Journal of Medical Diagnostic Methods
Open Access
ISSN: 2168-9784
ISSN: 2168-9784
Research Article - (2015) Volume 0, Issue 0
The paper presents a novel method of real time telepathology system which is a combination of ICT (information and communication technology) that aims to improve the delivery of health care facility by allowing the physician (pathologist) to view the specimen and make a diagnosis from a remote location without the dependency of the operator. The system possesses the capability of manipulating the microscope stage position through internet so as to adjust the sample slide that is to be viewed, assisting the expert to appreciate the histological images to be viewed in real time from far and distant location. This robotically controlled microscopic system make use of microcontroller along with multiple software which helps in altering the microscope stage positioning through commands received over internet as requested by the user. The use of internet to access the microscope make system possible to operate it from anywhere around the world where internet access is available and adequate bandwidth is present. The real time system of remote telemicroscopy possesses an accuracy of 1 mm along X-axis, 0.5 mm accuracy along Y-axis and 0.125 mm accuracy along Z-axis. Also, 5 MP webcam is used and for the purpose of sharing these images an internet connection having a minimum speed of 512 kbps is required.
Keywords: Telepathology; Remote telemicroscopy; Automated microscope; Internet of things; Control system
Infectionous diseases are a persistent threat and are the leading cause of death of children, adolescent and adults worldwide. According to world health organization approximately 50% of child mortality is caused by infectious conditions leading to infectious diseases [1]. Trends obtained from 2012 survey [2] updated on May 2014 reveals that the lower respiratory infection is among the top most killers in low income countries. Annually, sixteen percent of all deaths and three of the top ten deaths are the result of infectious diseases [3].
It is important to note that this mortality rate is attributable to preventable and treatable diseases, such as tuberculosis, malaria, HIV/AIDS, lower respiratory infections, influenza and various others. Lack of health facilities for people residing in remote places increases the health burdens, compounded by unavailability of diagnostic tools and experts which lead to misdiagnosis, resulting in spread of infectious diseases with high chances of mortality. The most affected countries are the middle and the lower income regions of the world.
This demands the great need in advancement of technology in the field of telemedicine in order to cater remote regions. This include telediagnostics, telepathology, telemonitoring, telesurgery, teleradiology and various others which could not only bridge the gap in providing quality healthcare access as well as lower the burden of such health diseases in far-flung areas of the remotest regions of the world. This proven that the reach of technology has overcome various barriers and restrictions and has made the healthcare access available to a remarkable extent. One of the innumerable advancement that has taken place in this discipline also includes those that have occurred in the field of pathology.
Considering the context of developing world, the project innovates a method of operating a Microscope over the internet for viewing and analyzing microscopic slides remotely, which deals with Tele-pathology. This can be described as the implementation of pathology at a distance. It incorporates telecommunication technology to aid the transfer of images and videos concerning pathological data, over distant locations for the purpose of research, education, consultation and diagnosis.
This remote tele-microscopy system was conceived as a means of sharing images of sample slide with experts for diagnostic purpose, that are not present at the location where the sample slide is uploaded on to the robotically controlled microscope using Arduino microcontroller so as to develop a mobile real time telepathology system which is the novelty of the remote telemicroscope system.
The major application of the system of remote telemicroscope is found in the field of telepathology. The literature review conducted for the designed system revealed that little work has been published concerning the use of internet to control microscope and to transfer/share images in real time for the purpose of study and evaluation.
Telepatholgy system aims to spread diagnostic facilities far and wide enabling early interventions and accurate treatment of various infectious diseases. Various methods have been tested and applied in recent years to develop state-of-the-art telemicroscope system.
System of telepathology are classified into three categories namely,
Static image based---The image of the specimen on the sample stage is captured via digital camera connected to microscope and s then transmitted.
Virtual slide---Slide is scanned completely using a slide scanner and a high resolution digital image are captured for transmission
Real time----This system permit user to adjust microscope from a distance and allow evaluation of histopathology slides by capturing images of the specimen via camera.
Our system is designed to obtain a real time consultation using a real time remote telepathology system.
Louis and Dhaval in 2015 [4] developed an affordable system of OMT having pEHR database and mWSI app such that the acquired mWSI images can be accessed from anywhere having an internet connection through web and mobile hence offering health care diagnostic practice at a low cost and in low resource environment.
The paper presented by German et al. [5] introduces a whole slide telepathology system that make use of mobile phones. The images in the discussed WSI telepathology are acquired in jpej2000 standard. In order to overcome the problem of large data size that is associated with WSI technique of telepathology system the authors uses a specialized compressing and decompressing softwares so that they can maintain the integrity and quality of the image.
For the purpose of improving health care in dermatology domain Speispr et al. introduces a cost effective method of telepathology that is dynamic non robotic type. Such systems allow submitting pathologist to manipulate microscope as commanded by the consulting pathologist. The integration of non robotic telepathogy system with tablets and pc introduces a low cost method of providing diagnostic to dermatopathology cases [6].
Ignacio et al. [7] design a low cost telemicroscopy system that is capable of sharing images with expert so as to provide second opinion using various modes of telecommunication networks. Inorder to convert microscope images to digital images the system incorporates a digital camera enabling the expert to access these digital images from a remote location and provide correct diagnosis.
By analyzing the increasing penetration of smartphones Abderrahim et al. put forth a low cost solution to deliver diagnostic facility at remote location. The system make of a mobile phone with an integrated camera that captures images and helps in detection of skin cancer and other skin related diseases by using the artificial neural network algorithm [8].
Devon C. Gimbel et al. [9] employ static image telepathology system for the purpose of providing diagnosis of skin lesions in east Africa where there is a limited access to primary diagnostic dermatology test. Their system incorporates iPath server to provide consultation by dermatologist of Massachusetts General Hospital and yields 91% of diagnostic efficiency hence proved to be a cost effective means of providing second opinion.
For the purpose of providing immediate diagnosis Marie-Claude T. et utilizes an expensive technique of virtual slide telepatholgy system. Their system comprises of a microscope with an attached camera that can be robotically contolled. Virtual images of the complete slide are produced by an automated slide scanner, which are accessed by the pathologist for examination. These virtual images can also be stored and transmitted over the internet to other locations for study purpose. These virtual slide systems sometimes have an increased data size exceeding one gigabyte. Also simultaneous storing and retrieving of large sized files is difficult in virtual slide telepathology systems [10].
Essam A make use of whole slide imaging technique of telepathology system to provide consultation on complicated pathological cases saving time, money, improving health care services and also sharing knowledge between Italy, UK and US [11].
Livia and Eduardo [12] uses M-phone technology for the purpose of providing teleconsultation because of the limited access of broadband services in Africa. Mobile phone having the camera resolution of above 8 were preferred to be utilized for the purpose of capturing the images of the specimen subjected under microscope which is then sent via MMS to the expert for obtaining second opinion.
Roberto et al. [13] in 2008 uses features of both virtual slide telepathology system and real time telepatholgy system to develop a hybrid system so as to improve health care conditions and facilitate health care education by sharing images. The organizational model for telepatholgy system was designed for delivering health care to distant location and comprises of three hospitals.
In 2008 virtual slide and virtual microscope were used by Yasunari et al. [14] to implement a telepathology system in kyoto, japan and yields rapid interpretation of slides.
In 1997 Ron et al. [15] develop a system where researchers can work in a collaborative manner around the world by simply viewing the work being conducted on a remote scope remote scope, through ISDN. Also, the system allows the remote scientist to remotely manipulate the microscope in X and Y directions. Moreover the system enables the scientist to view multiple slide.
The system of telemicroscope enable observation, examination and evaluation of the specimen by utilizing tele-communication channels such as internet so that the patient record and expert opinion can meet at the same location regardless of current position of the patient.
It provide an alternate method of scanning slide without the dependency of the operator, allowing the physician (pathologist) to view the specimen and make a diagnosis from a remote location hence ensuring improvement in deliverance of health care facility around the globe and minimizes the spread of various life threating diseases.
The proposed system of remote telemicroscopy is an integration of hardware and software components to achieve remote diagnosis and hence ensuring health care facility deliverance at far and distant locations.
The hardware architecture of telemicroscopy system comprises of microscope and motor selection and their corresponding bracket/mount designing and development that can support motors that need to be mounted on to microscope stage so that the movement of microscope from a distant location can be made possible. Also gear ratio is an important consideration in case of remote telemicroscope system as it has a crucial role in controlling speed of motors. Not only this camera mounts were also required to be designed and developed so as to be placed/incorporated with the eyepiece so that the image of histological slide can be captured and passed onto the expert present on the remote location.
The system of remote telemicroscopy starts/begins with its very necessary requirement of microscope selection. For the purpose of simplicity compound microscope with one eyepiece as represented in Figure 1 having sufficient space for motor placement on microscope stage was utilized.
Figure 1: Microscope utilized for remote telemicroscopy
Remote telemicroscopy system enables controlling microscope stage in all the 3 directions i.e X-axis, Y-axis and Z-axis for which 3 DC gear motors were utilized.
In order to reduce speed which is one of the requirements of the system DC gear motor indicated in Figure 2 is the perfect choice.
Figure 2: DC gear motor.
Thus, for this system Micrometer RH158.12.30 spur gear motors [16] were used. The reasons for choosing this category motors were easy availability, low cost, low voltage consumption high current rating, less weight (Approx. 190 g) and also it can be mounted in any position.
Motor mounts were also required to be designed and developed for supporting motors responsible for the movement of microscope stage. The criteria for mounting depend upon the size, weight and use of motors. As the motor used is small therefore a rigid mount, with frame welded directly to a steel plate (formed to match the shape of the frame) is designed that also possess mounting holes.
As three motors were employed in the development of this system, therefore three different types of mounts were developed whose design varied according to the positions they were to be fixed on. For the purpose of simplicity, the mounts were named according to the direction in which the motors caused the rotations; namely:
1. X-axis mount as appreciated from Figure 3;
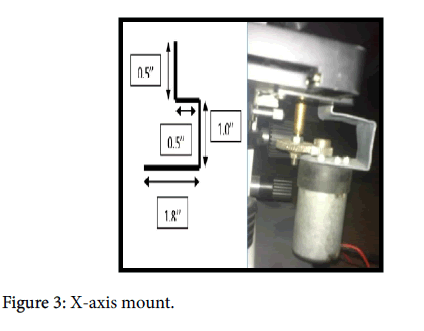
Figure 3: X-axis mount.
2. Y-axis mount indicated in Figure 4;
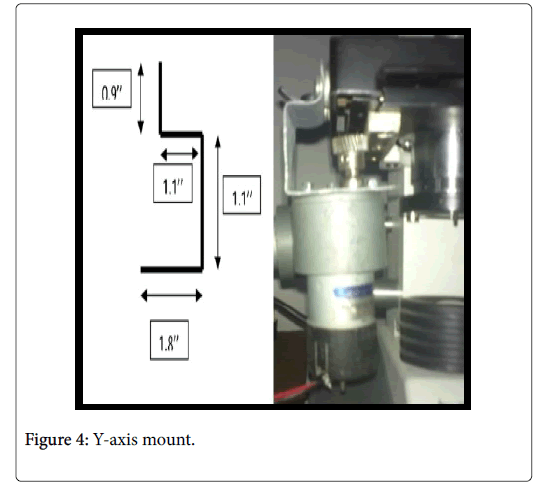
Figure 4: Y-axis mount.
3. Z-axis mount shown in Figure 5.
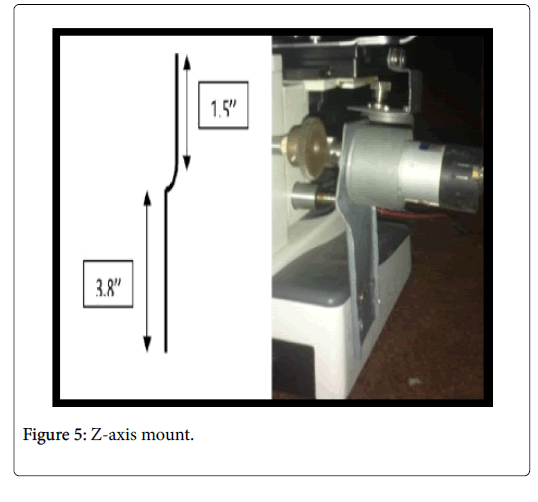
Figure 5: Z-axis mount.
Galvanized iron material was preferable choice for motor mounts because of its low cost, low density and high corrosion resistivity.
In order to fulfil the requirement of speed control gear ratio calculation were performed for which area of the slides that was to be viewed through the microscope was analyzed which was found to be 15 × 15 mm as described in Figure 6. Also, the distance between the teeth of the rack affixed to X-axis knob was noticed and was found to be 1 mm. Based on this, it was decided to keep the teeth distance for the designed gears as 1 mm.
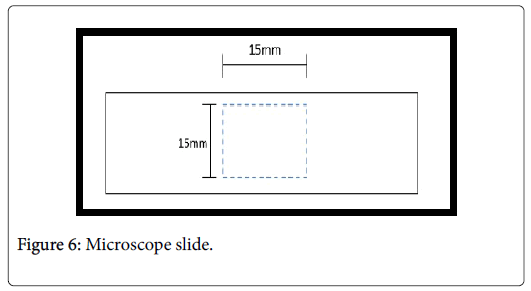
Figure 6: Microscope slide.
These observations lead to conclusion that in order to achieve a minimum speed knob rotation, so as to achieve high torque, we need a smaller driver gear.
This then led to the decision concerning the number of teeth on each gear. Thus after trial and error, following specifications were assigned:
Small gear:
No. of teeth: 28;
Gear diameter: 7 mm;
Large gear:
No. of teeth: 56;
Gear diameter: 15 mm;
The gear design is represented in Figure 7.
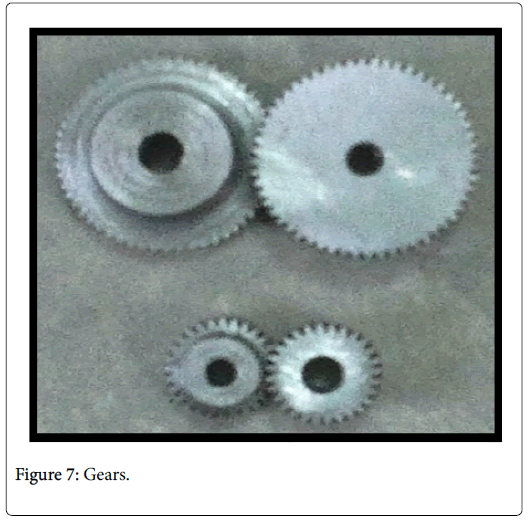
Figure 7: Gears.
Also the material selected for gear development was iron because it succumbs to less wear and tear as compared to other materials, such as aluminum and stainless steel.
Camera mount is also needed for the purpose of integrating the eyepiece with the camera, a simple PVC pipe was used, the shape and dimensions of which were decided on the basis of eyepiece diameter i.e. 3 cm and its length, which was 9.4 cm. Camera mount is illustrated in Figure 8.
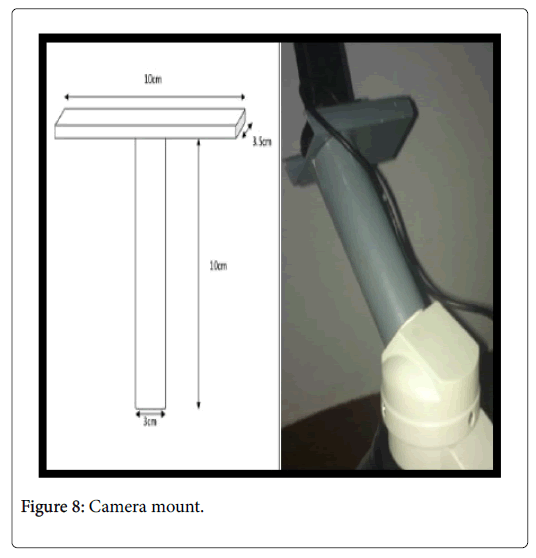
Figure 8: Camera mount.
The use of PVC was the best available choice due to its low cost, negligible weight and easy handling.
The details of measurements for camera mount include:
Microscope eyepiece specifications
Lens (inner) diameter: 1.5 cm;
Outer diameter: 3 cm;
Eyepiece length: 9.4 cm;
Mount specifications
Cylinder length: 10 cm;
Cylinder diameter: 3 cm;
Rectangular support: 10 cm × 3.5 cm.
Pro-E software was utilized in remote telemicroscopy system, where dimensions of the motor mounts, camera mount and gears were designed based on the structure of the microscope used. Shapes, positioning and fixing was decided based on the designs made on this software. Thus, a 3D model of the microscope represented in Figures 9-11 was obtained, which was then followed to prepare the mounts and gears.
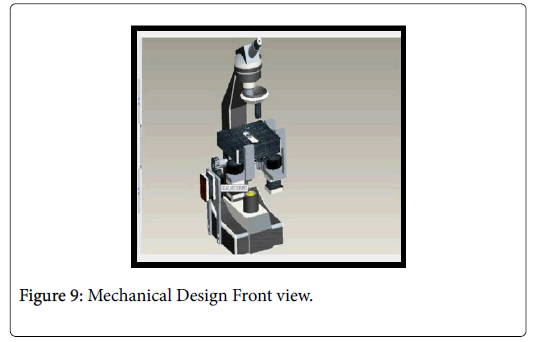
Figure 9: Mechanical Design Front view.
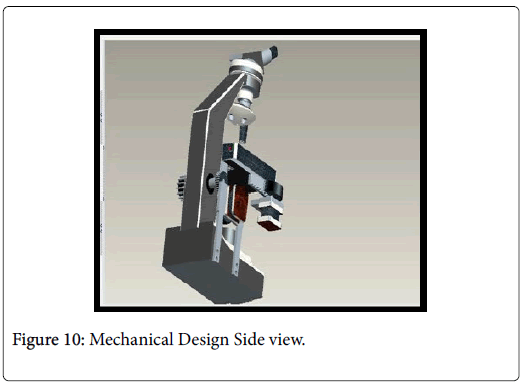
Figure 10: Mechanical Design Side view.
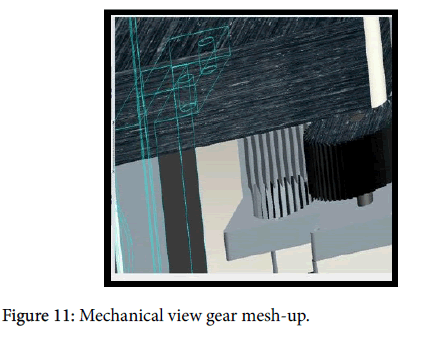
Figure 11: Mechanical view gear mesh-up.
In order to the make the motor operate, a need to design a motor driver circuit arises for which L298N was used, which is a dual H bridge IC [17]. Other components of the motor driver circuit includes 7806 regulator IC, 0.47 ohm resistors, 1 amp diode, heat sink and pull down configuration of push buttons.
Proteus software was used so as to design the right motor driver circuit which was then implemented onto a varo board as represented in Figure 12 and finally a PCB design and PCB board was then developed as shown in Figure 13.
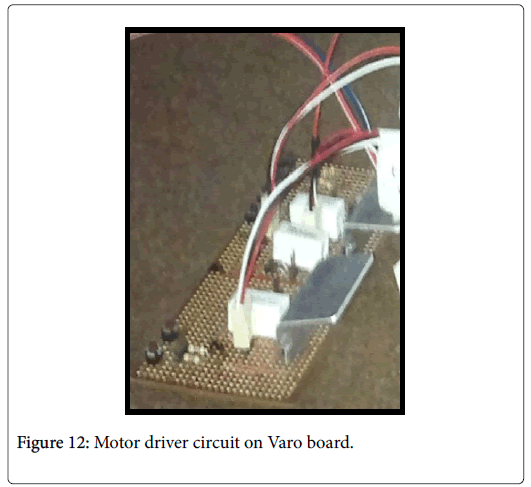
Figure 12: Motor driver circuit on Varo board.
Figure 13: Motor driver circuit on PCB.
Due to a wide variety of ICs, added professionalism, better simulations and an added feature of Arduino library Proteus was preferred for designing motor driver circuits. Figures 14 and 15 indicates motor driver circuit design and simulation using Proteus.
Figure 14: Motor driver circuit simulation.
Figure 15: 3D view of Proteus.
Lastly, the hardware architecture of remote telemicroscopy system involves the usage of Arduino microcontroller, which was integrated with L298N as depicted in Figure 16. It serves as a communication link between hardware and software components of the remote telemicroscopy system.
Figure 16: Arduino microcontroller.
Arduino microcontroller was a preferable choice because of its better understanding and also because of its ability to handle the input output for 3 DC gear motors utilized in remote telemicroscopy project.
Software selection and its proper integration is a crucial task in the system of remote telemicroscopy as it is through these software’s that microscope stage manipulates, by sending commands to microcontroller over the internet from the client server, can easily be achieved remotely.
The software’s employed for the purpose of achieving the goal of remote diagnosis includes Arduino software. Also, C-sharp helps in accomplishing the defined goal by serving as the communication platform between the computer and the Arduino microcontroller. Moreover, there was also a need for image processing software for this system. Not only this an internet software was also utilized for website development.
In order to establish a communication link between the hardware and software constituents of remote telemicroscopy system Arduino software was used. An Arduino code was developed so that it can send commands to Arduino microcontroller which in turn causes the hardware component of the project operational. Figure 17 represent Arduino software environment and Arduino code.
Figure 17: Arduino software environment.
Also a program of C-sharp was developed which serves as a platform for linking the Arduino microcontroller with the computer i.e. the host server.
C-sharp is used because of its various advantages, one of which is ease of use as well as visual implementation of forms, buttons and various other components that were required to serially communicate with the microcontroller. Also an added advantage of C# is it compatibility with the web server.
For the system of remote telemicroscopy, C-sharp has the following three major roles: to read command to direct orders to microcontroller to delete command file C# programing environment is shown in Figure 18.
Figure 18: C# programming window.
Abyss web server was installed, configured and then used for the purpose of website development. It enables to develop website which is one of the requirement of the system of remote telemicroscopy so that the commands that are provided by the user as input on web page are proceeded forward for the purpose of accomplishing the task of motor rotation of each X, Y and Z axis which in turn causes microscope stage manipulation with the help of the codes that are generated.
Also PHP was installed and integrated with abyss web server so that the combination of the two software’s can help develop a user interface as illustrated in Figure 19 from where the user commands can be taken as input and are forwarded to C# and Arduino for achieving the goal of remote tele pathology.
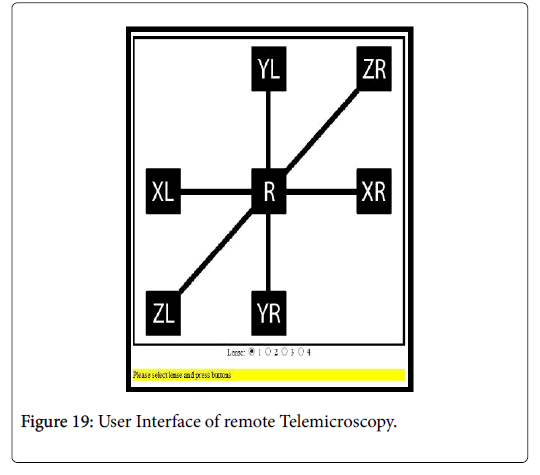
Figure 19: User Interface of remote Telemicroscopy.
Finally for the purpose of image processing yawcam software was used. Yawcam enables real time capturing and transferring of image to the remote location so that the pathologist at a distance location is able to view image of the specimen being exposed on to the microscope stage for observation and evaluation. Yamcam result for remote telemicroscopy system is represented in Figure 20.
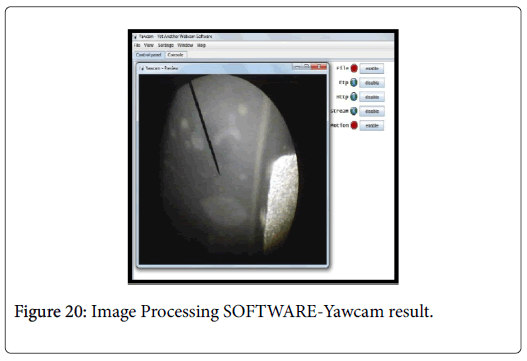
Figure 20: Image Processing SOFTWARE-Yawcam result.
The tele-microscope system abyss web server is used for website development and is integrated with the PHP, which serves as the bridge between the web environment and the object oriented programming language (visual studio C#). The web page consists of buttons to take input from the user and generate a code corresponding to each button click. This code is then saved and forwarded to visual studio C#, which reads commands that are given as the input by the user.
Computer software i.e. visual studio C sharp provided an interface platform for the computer with the microcontroller, separates and identifies the command and sends specified bit to the Arduino software which compares it to the variables it have and hence causing the motor to move in the specified direction.
In-order to have a real time imaging of the specimen placed onto the microscope stage, image processing software such as yaw-cam is used. It enables the user to appreciate the images of the specimen corresponding to changes of the microscope stage.
Arduino microcontroller is used to send commands to the motor driver circuit allowing motors of all X, Y and Z directions to rotate according to the commands provided to it. The Arduino code serves as the connecting link between the software and the hardware circuitry.
To make the motors functional motor driver circuit was designed using electrical software that is Proteus, which is preferred because of its better simulation and added features of Arduino library. The motor driver circuit is then developed that drives the motor of each axis.
The eyepiece of the microscope is connected to the camera so that the camera can capture images without affecting image formation, and can be transmitted for observation. In-order to connect the camera to eyepiece of microscope a camera mount was designed utilizing 3-D modelling software such as pro-e.
The tele-microscope system also consists of motors attached to the stage of microscope. The motors of each axis are supported by bracket of specified dimensions. Gears were also used with each motor to reduce the speed as precision is required for observing a sample under microscope. Mechanical software such as pro-e is utilized for the purpose of designing or modelling brackets and motor gear. Remote telemicroscope system integration is depicted in Figure 21.
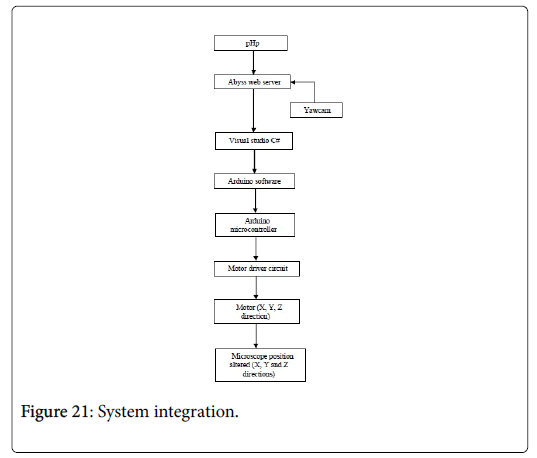
Figure 21: System integration.
As the user enters the web address the system makes the web page available to the user. This web page comprises of the user interface consisting of buttons for each of the 3 motors and their respective directions. These button click entered by user is taken as input and a file is generated in response to these input. C-sharp then reads these files and send command to the Arduino microcontroller which in turn activates the motor of specified axis in described direction with the help of motor driver circuit. Since these motors are connected to the microscope stage ultimately causes it to move as indicated by the user. The camera mounted on the eyepiece captures the images continuously and display them on the window that is made available to the user once they entered the web address.
The real time system of remote telemicroscopy utilizes a gear ratio of 1:2 to attain an accuracy of 1 mm along X-axis, 0.5 mm accuracy along Y-axis and 0.125 mm accuracy along Z-axis. Also, the focus range of the system is 10 mm. A 5 MP webcam is used having a resolution of 1024 x 786. After scanning the complete slide the image of the interested slide area that is captured have a resolution of 640 x 480. For the purpose of sharing these images an intenet connection having a minimum speed of 512 kbps is required.
In this way the project of remote telemicroscopy yields the desired results and hence ensure deliverance of health care facility at far and distant locations in real time. Telemicroscopy system results can be appreciated from Figures 22 and 23.
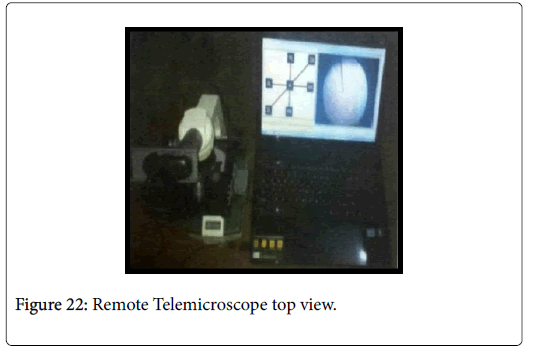
Figure 22: Remote Telemicroscope top view.
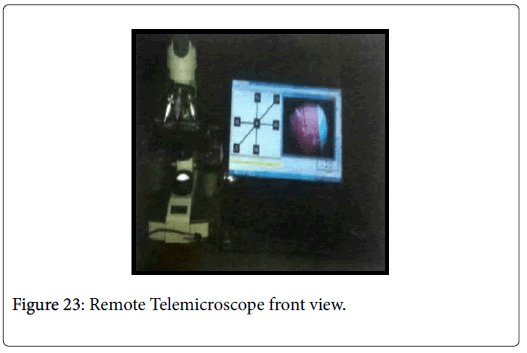
Figure 23: Remote Telemicroscope front view.
Telmicroscope system has proven to be a crucial technological advancement in enhancing health facilities by providing healthcare diagnosis no matter where the patient and the physician (expert) are.
The telemicroscope system is not limited to the stage control only, it can be further enhanced by incorporating the objective lens control and illumination control of in future. The features of saving the digital image and incorporating diagnosis into web page can also be added to the system in order to make it more efficient.
First praise is to Allah, the Almighty, on whom ultimately we depend for sustenance and guidance. Acknowledgment is due to NED University of Engineering & Technology, Karachi for the support it has provided us for the completion of the remote telemicroscopy system. We would like to thank everyone who had contributed to the successful completion of this system. We would like to express our gratitude to our project supervisor, Mr. Saad Abdullah for his advice, guidance and his enormous patience throughout the development of the work. We would also like to extend our thanks to Mr. Naveed-ur-Rehman and Ms. Nida Husyin for their assistance and help.