Journal of Aeronautics & Aerospace Engineering
Open Access
ISSN: 2168-9792
ISSN: 2168-9792
Research Article - (2017) Volume 6, Issue 2
The applications of UAVs (Unmanned Aerial Vehicles) are growing up and becoming part of many daily tasks in many organizations. But as matter of fact, the use of a UAV does not mean the decreasing of operational complexities and, consequently, the costs of perform its tasks. Sometimes this high cost is connected to the dependence of welltrained operators and huge remote control facilities to operate a sophisticated UAV’s. This paper proposes an UAV that can perform its tasks as much independent of human interaction as possible, and with a minimum connection to its mission control facilities. This independence will be achieved by embedding the mission control into the UAV. As the mission control is embedded, the UAV will have less connections issues with its control center and will be less dependable of human interaction. Prove this concept all kinematics and dynamics of a light than air vehicle (blimp) is develop; a prototype of an embedded parallel distributed compute was constructed; and new procedures to resolve navigations and collision evasions issues are proposed. The new evasion procedures were implemented into a simulator and a new parallel/distributed program for optimal path discover was developed to be used into the cluster prototype. All tests of the evasion procedures simulator were satisfactory and the speed up tests using the embedded cluster showed the better performance of the proposed framework.
<Keywords: Airship; Path control; Unmanned Aerial Vehicles (UAVs)
The context of aircraft industry shows a well industry segment that is fully motivated by a well-established trade and passenger’s transport services which lead to well-tailored crafts with good cost-benefit and a huge infrastructure like airports, trade terminal, maintenance and repair facilities, and sets of rules and legislations [1-3].
But there is a set of aircraft tasks that takes long times, are monotonous, are performed in sensitive geographic places that demands specialized equipment and well trained crew. The examples of these tasks are: surveillance, patrol, data collection, search and rescue and so on. These tasks are being progressively substituted by drones or robotic aircrafts, which eliminated crew fatigue and improved performance. But although there are many improvements in electronic, robotic and computing, the costs of using the so called drones, especially in defense and surveillance increased a lot as stated in Table 1 [4,5].
| Platforms | Costs ($ per hour) |
|---|---|
| 71 meters balloon land based | 610 |
| MQ-1 Predator (robotic aircraft) – low operational celling; long range | 5.000 |
| Grumman E-2C “Hawkeye” – AWACS (Airborne warning and control system ) – Seagoing aircraft | 18.000 |
| RQ-4 Global Hawk (robotic aircraft) – high operational celling; long range | 26.000 |
Table 1: Operational costs of surveillance crafts.
The reason for this increase of cost using drones is because you eliminated the on-board crew but you still need them, and some time even more people than the normal crew, in the remote operated station. So you are dependent of human operation even in a remote way of work.
Motivated by a scenario of new applications for autonomous aerial unnamed vehicles, especially air ships, this work proposes a new guidance framework. This frame work is composed of an embedded parallel distributed computer, a new collision evasion system and parallel distributed mission route generating program. The proposed frame work is tailored for the specific air ship dynamic and will guide the blimp safely and in a reliable way during any of its typical missions.
The next sub-session will describe each part of the new framework. The rest of this paper is organized as: Materials and Methods section describes the most related works with our paper, a proposed UAV, and the new proposed path control system; Results and Discussion section shows tests and their results, and possible tasks and mission suitable to the proposed framework; and Conclusions section talks about conclusions and future works.
Vehicles path planning is one of the most studied subjects. It is considered a computational complex or with exponential complexity of time solution problem. In this section the most relevant and related works with this proposed this propose will be briefly described.
The collision evasion in dynamic environments (the ones with mobile obstacles) is discussed in Badia [6]. The work compares the needs and difficulties of two kinds of platforms: blimps and helicopters. The author proposes an approach based in insect vision model (specifically a grasshopper) that is modeled by neural network to avoid collisions of robotic helicopter. The direction of the object to be avoided is supplied by Reichardt correlation model.
The control attitude of a robotic blimp that keeps a specific position is proposed by Yang [7]. The work uses the sliding control technic that is implemented by a fuzzy logic system that uses a Lyapunov filter and the stabilization theorem.
Dadkhah et al. [8] proposed an infinity or achievable horizon optimization method to unknown environments. The work is based in a finite optimization time and is dependent of computational performance of the used equipment. It uses a finite state model of the movement of a mini robotic helicopter vehicle. The proposed work uses cost function called tail discharge or path horizon.
The task of control a robotic blimp in a strong wings environment is studied by Saiki et al. [9]. The work proposes a stability control of the aircraft using following path technic, flying against the wind. The stability control uses a Lyapunov function that follows pre-establish rules. An adapted remote control blimp of 12 meters of length was used in satisfactory tests.
The floatability and attitude control of a blimp using just density variation of a pair of balloons inside the craft is the subject [10]. The work uses the same floatability systems used by aquatic gliding animals, to make the blimp move in the air. It takes in account the difference of behavior of aquatic systems when they are used in the atmosphere where the air behaves as compressing fluid. The work uses a feed-back control constructed over the motion equation of studied airship. The control system uses a linear quadratic regulator to generate feed-back gains.
A path optimization that uses finite retreaded horizon is proposed in Mettler and Kong [11]. The work uses a Lyapunov as a cost-to-go function to construct a viability path graph to be optimized. After that the optimization problem is solved as sequential finite state control and sequential decision problem and is used as global planner fed by a finite retreaded horizon method. The work compares the performance and computation load of other works and the proposed model. The tests were conducted in real environment using a Blade CX robotic helicopter.
A robust and simple navigation system using fuzzy logic is the subject of González et al. [12] that uses a Plantaraco robotic blimp. The work uses ultrasonic sensors to get data about the surround environment. These data feed a collision evasion fuzzy system and that generates quick turns of 180 degrees. The tests results show a wellbalanced behavior of the fuzzy controller which can be even trained.
The control and surveillance of natural disaster areas by a robotic blimp is proposed by Fukao [13]. The blimp uses a path control system with speed field method and an optimal inverted path controller as control strategy. The used strategy was efficient in strong winds environment to avoid complex time corrections in the path. The optimal inverted path controller uses y and x coordinates, a non-linear looping based in a Hamilton-Jacobi-Bellman equation, and a Lyapunov filter to horizontal vehicle control. The practical tests used a 12.2 meters length blimp, payload of 15 kilograms, with wind sensors and stereo cameras.
Rottmann et al. [14] proposed a path control using a reinforced learning method. The method keeps the blimp high using previous environment conditions and agents (autonomous computational programs). The agents programs get bonus when they execute right actions that maximize a Monte Carlo search method used to search solutions. This method lead a direct learn, with no need of previous data storage by agents programs. A Gaussian function is used to avoid problems about search space size duet to learning search of state-action tuples. The state components of these tuples are captured by ultrasonic sensors during blimp navigation and a Kalman filter removes any noise. The tests used a 1.8 meters length blimp and were conducted indoors in 5 meters high old factory shed.
The overall robotic blimp dynamic is described in a mathematical model by Gammon [15]. This model is used to develop a predictive and adaptive robust non-linear control that is used to navigate and guide a robotic blimp over environment disturbs. The blimp dada (like: longitudinal flight, climb rate, turns and etc.) were collected and the blimp dynamic mathematic model was generated by MATHLAB suite.
Azinheira’s [16] AURORA project proposes an image capture system that models a set of elementary signals. This set establishes a relationship between the blimp speed and the land targets. It uses a similar model of the pendulum problem but with association of the movement to a zero distance with the blimp. The work takes in account the wind effects in three possible situations: without wind and no environmental disturbance; with wind and weak environmental disturbances; and with winds strong environmental disturbances.
As the works described in this session show, the framework proposed in this article has nothing similar and the only work discussed that has something in common is proposed in Autonomous blimp control using model-free reinforcement learning in a continuous state and action space [14], but it do not proposes a coordination of path control and obstacle avoidance, as this article proposes, and in Autonomous blimp control [14] obstacle avoidance is not robust and vivid as the collision avoidance of this work.
The proposed UAV
This work proposes an elliptical shape blimp with 36 meters long and 9 meters wide as shown in Figure 1. It will have two thrusters alongside its length (for climb maneuvers) and a tail thruster (for direction maneuvers) and a cargo bay.

Figure 1: An example of blimp.
UAV kinematics
The blimp orientation is performed by a set of angles called Euler angles, shown in Table 2 [17-19], that together with three position coordinates (x, y, z) describes the blimp´s attitude.
| Degree of freedom (DOF) | Forces and moments | Linear and angular speeds | Euler angles and position |
|---|---|---|---|
| x axis movement (surge) | X | u | x |
| y axis movement (sway) | Y | v | y |
| z axis movement (heave) | Z | w | z |
| x axis rotation (roll) | K | p | φ |
| y axis movement (pitch) | M | q | Ɵ |
| z axis movement (yaw) | N | r | Ψ |
Table 2: Euler angles.
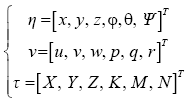
The Euler angles plus the three positions coordinated p describe the coordinate vector η and all together they describe the blimp orientation as shown by (1), (2) and (3) equations:
 (1)
(1)
 (2)
(2)
 (3)
(3)
A blimp is a sub-actuated vehicle and it means that it demands less control data than degrees of freedom DOF’s [19]. The minimal representation to describe the control data to aerial vehicle is the roll (Φ), pitch (Ɵ) and yaw (Ψ) plus the position vector coordinates p, will describe the blimp behavior at any time. The blimp position is described in relation to inertial coordinates and its linear and angular speed by a body fixed referential, so the following vectors describe a blimp behavior [17-19]:
 (4)
(4)
 (5)
(5)
 (6)
(6)
 (7)
(7)
 (8)
(8)
 (9)
(9)
 (10)
(10)
 (11)
(11)
 (12)
(12)
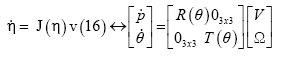
The η vector (1) has the referential coordinates in a specific referential and v and τ vectors (7) (10) the speed and the applied forces related to inertial referential. So the relation among variables of each referential where one referential is passed to each other i.e., lighter than air robots [17] and Marine control systems [19] can be described by:
 (13)
(13)
 (14)
(14)
 (15)
(15)
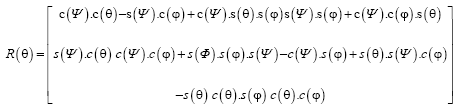
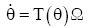
Where c and s are cosine and sine respectively and T is given by:
 (16)
(16)
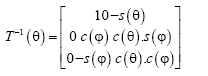
 (17)
(17)
 (18)
(18)
So taking a blimp with an inertial reference that is in its body mass reference. It start his path in a geographic coordinate (Rio de Janeiro) and it must go to another coordinate (São Paulo). The starting orientation of the blimp is pointing towards north. The path control must convert those geographic coordinates into Cartesian coordinates: x, y, z, ones [20-22] and then use equation (12) to calculate the azimuth angle and the distance. For this example the azimuth angle will be – 133, 9478° and the distance will be 352 kilometers. So as the blimp reaches the target (São Paulo city) it repeats all the procedure to reach the next target and so on every time it reaches a target.
UAV dynamic
The blimp dynamics, described in the studies of Sebbane [17] and Fossen [18,19], takes in account many data about the effects of: aerodynamics, structural issues, actuators, and propulsions. Using Newton and Lagrange laws where the of forces and momentum applied to rigid bodies leads to:
 (19)
(19)
 (20)
(20)
Where:
M = MRB + MA: rigid body system inertia matrix (including the virtual masses)
C(v) = CRB + CA(v): Coriolis forces matrix and centripetal forces matrix (including the virtual masses)
D(v): aerodynamic dumping matrix.
g(η): gravitational forces and momentum and static sustentation vector.
τ: control data vector.
As a blimp is sub-actuated vehicle the roll and pitch angles are minimal and can be set to zero:
 (21)
(21)
So equation (20) can be simplified to equation:
 (22)
(22)
And (20) can be rewrite in a linear shape as:
 (23)
(23)
 (24)
(24)
The state variables are defined as:
 (25)
(25)
and
 (26)
(26)
Where u is the control variable vector, so the solution for the dynamic of the blimp is:
 (27)
(27)
 (28)
(28)
The results (28) and (27) do not represent the temporal dependency of variables, so the following model (27) expresses these dependencies:
 (29)
(29)
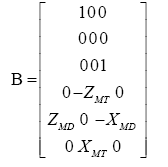
Where D is the linear dumping matrix, G is the restoring forces matrix, and M is the system inertia matrix that is given by:
 (30)
(30)
The matrix B comes from a vector decomposition of control vector:
 (31)
(31)
 (32)
(32)
So using a blimp payload of 1350 kg, two propulsion and one direction motor with 150 kg each, and a compressed air tank of 0,3750 m3 (for stability and buoyance proposes), an elliptical air envelop with b = 18 meters, and a = 4,5 meters, the blimp must have a density of 0,1670 kg/m3 [17,19 ]. Using equations (18) (27) and (28) and the blimp lay out from figure 1, the virtual inertia matrix is calculated shown in the studies of Sebbane and Fossen [17-19].
The aerodynamic dumping matrix elements from [17-19] and Ricardo Jorge Costa Alcácer [23] are used to calculate the force needed to the blimp reach a specific speed. For example, if a speed of 18 m/s with an acceleration of 0,4 m/s2 towards a win of 3 m/s is required, just use [24] to get 1219,2 N for value the propulsion needed, and so motors can be chosen. In the same way the force needed to change the blimp direction can be calculate by Fossen, T. I [18,19, 24]. For example, if the blimp makes a turn using an angular acceleration of 0,02 rad/s2 and an angular speed of (π/12) rad/s the needed force will be 190,31 N by the third motor at the stern of the blimp and orthogonal to xz plane or in y axis direction.
As the propulsion and redirection forces can be calculated, the development of any control system goes stray forward using any methodology, and as this not the main subject of this article, it will not be described here.
The new framework
The frame work proposed in this article is composed of an embedded parallel distributed computer, a new collision evasion system, a parallel distributed mission route generator program, and a set of electronic sensors.
The embedded computer cluster
The Beowulf based computer cluster [25,26] is a reliable and easy way to construct a high performance computer facility. This kind of cluster can provide a lot of benefits like free parallel distributed programming environment, high performance programing tools and so on and it is a mature and a well-tested technology. So this work proposes a framework compounded of an embedded computer cluster made of four nodes connected among them by a switch. The cluster main node will be connected with arduino [27] or similar interface to control airship movements and to radio link connect the cluster to the mission supervision center. The Figure 2 shows the basic computer cluster layout.

Figure 2: The embedded computer cluster.
The speed of route calculations on fly is crucial to make the framework reliable and effective. So a brand new platform is used as cluster nodes: four ODROID-x2 open development platform, based on Exynos 4412 Prime 1.7GHz ARM Cortex-A9 Quad Core with 2GB memory and two and 2 e ODROID-C1 [28], [29- 31] as shown in Figure 3. The cluster will supply the airship enough computer power to generate its routes on fly as it needs and it will run a new, vivid and specific obstacle collision detection and avoidance system. The main path generator task must performed by a graph path discover program. The Traveler Salesman (TS) algorithm was chosen to perform it. A version of TS program was modified to be executed in a parallel / distributed programing environment, using MPI (Message Passage Interface) library, so it can be execute in our embedded computer cluster. The parallel/distributed TS will be performed any time it is needed, as consequence of any disturbance in previously calculated rout due to any obstacle avoidance performed procedure and every time an estimated target is reached or any other significant disturbance that affected the airship attitude or flight.

Figure 3: ODROID-x2 and ODROID-C1 board data.
The new path control system
The Path Mission Control System (PMCS) uses a set of pre-selected targets to be reached by our autonomous managed blimp. The set of targets is used by the parallel distributed TS module of the PMCS to establish an optimal route to complete de mission. During the execution of planned route the Laser Detection and Ranging (LIDAR) [32, 33] and normal radar are used to scan possible unpredicted and unexpected obstacles. The LIDAR and radar perform their scans and as soon and obstacle is detected it is analyzed and the proper avoidance procedures are taken. The Figure 4 shows a flowchart of the PMCS and its main modules. The avoidance procedures are described in next session.

Figure 4: Path mission control system.
New obstacle avoidance systems
As part of PMCS a new collision avoidance system is proposed. As described in sub-session B, the airship is equipped with a LIDAR and radar to detect obstacles. The radar will make a long range search and detection of obstacles, while the LIDAR will sort range detection and it will collect precise data of obstacle like: distance, speed and attitude. The system identifies two classes of obstacles: fixed and mobile ones. The PCMS have two different procedures: one for fixed obstacles and another for mobile obstacles as shown in Figure 5.

Figure 5: Obstacle evasion.
The procedure for detection of fixed obstacles uses fallow the wall philosophy and it takes LIDAR data to decide with side to turn to contour the fixe obstacle as wall, as shown in Figure 6. The Figure 7 shows the flowchart for fixed obstacle avoidance procedure of PMCS.

Figure 6: Fixed obstacle avoidance example.

Figure 7: Fixed obstacle procedure.
A new and innovative procedure to detect mobile obstacles been proposed in this article. This new procedure uses the data from LIDAR and COLREGS72 (Convention on the International Regulations for Preventing Collisions at Sea) [34] navigation rules for cross routes to avoid possible collision situations. The reason to use the navigations rules is because the airship has similar behavior (dynamic forces) of a ship, and as COLREGS72 rules are widely used and tested in control ship and their movements and routes, they must work fine with the path control of blimps. Figure 8 shows a flowchart of the avoidance mobile obstacle procedure module from PMCS and Figure 9 shows an example of COLREGS72 rules.

Figure 8: Mobile obstacle avoidance system.

Figure 9: Sequence (1), (2), (3) and (4) shows a lateral avoidance collision with a mobile obstacle.
To prove the correctness of the proposed obstacles avoidance algorithms of PMCS, a blimp orientation simulator was constructed where all path situations with fixed and moving obstacles to be avoided can be simulated. This simulator is a simple graphic program developed in Delphi and it uses the proposed rules to avoid fixed and mobile obstacles. All collision scenarios of fixed and moving obstacles were extensively tested and Figure 10 shows the main screen of this simulator.

Figure 10: Obstacle simulation evironment program.
UAV sensors and navigation framework layout
A basic set of sensors is necessary to support airship autonomous operation. The basic sensors are: electronic compass, speed sensor, wind speed sensor, accelerometer, altimeter, frontal radar with 30 kilometers of range and 90 degree of aperture, LIDAR with 10 kilometers of range and 90 degree of aperture, GPS, electronic gyroscopic, six ultrasonic close range sensors (about 50 meters’ range) and four digital cameras. These should be basic and always present sensors that will supply data for airship navigation and attitude procedures. Depending on the kind of mission, some extra and specific equipment will be necessary as: night vision high resolution cameras, electronic surveillance devices for law and enforcement and patrolling tasks, and so on, as shown in Figure 11.

Figure 11: Airship equipment basic layout.
Tests and development
A set of tests were carried out with all possible frontal collision scenarios. They were performed in our attitude and collision avoidance occurred without problems in all tested scenarios confirming the accuracy of propose methodology. Parallel distributed version of TS program is developed and under tests in our embedded cluster. The execution times of parallel distributed TS program will be compared with the already collected times of the sequential version of TS program to measure the real speed up of new parallel distributed version. In the parallel distributed TS version sets of 8, 16, 32, 64 and 128 nodes in possible target graphs are being executed in the prototype cluster to collect execution times to show the speed up of parallel executions.
The four ODRIOD-x2 boards and two ODROID-C1 boards as shown in Figure 12, were tested individually with the properly certified version of Linux (UBUNTO flavor). Both of the ODROID boards are based in ARM microprocessor architecture. The tests were satisfactory and linux installations were tuned to run only the essential services to make them light weight operational systems. After that an embedded computer cluster were constructed as shown in Figure 13. The four are ODRIOD-x2 boards were connect to eight ports switch and basic cluster tests are being carried on, and the preliminary tests and performance of the cluster are satisfactory. After the basic tests with the parallel/distributed version of TS prove the speed up of path discover under a parallel/distributed environment, a more realistic test with real geographic points will be carried on to reinforce our concept and a more realistic scenario.

Figure 12: The four ODROID-x2 in the test bed and a example of ODROID-C1 board.

Figure 13: The embedded computer cluster prototype.
And finally PMCS, will integrate the avoid collision procedures and the parallel/distributed TS program and together they will control the hole airship path during a blimp mission.
The biggest task is the airship construction itself. As shown in previous sessions all calculus was done and the research group is searching for grants to start to construct a prototype with the dimension used in previous sessions.
The results of tests using blimp orientation simulator is shown in Table 3. The results show that all collision situations with fixed and mobile obstacles were avoided by proposed avoidance procedures.
| Blimp orientation | Fixed obstacle | Mobile obstacle | Result |
|---|---|---|---|
| South-north | In front of blimp’s route | - | Evasion |
| South-north | - | From east to west crossing blimp’s route | Evasion |
| South-north | - | From west to east crossing blimp’s route | Evasion |
| South-north | - | From south-east to north-west crossing blimp’s route | Evasion |
| South-north | - | From north-west to South-east crossing blimp’s route | Evasion |
| South-north | - | From south-west to north-east crossing blimp’s route | Evasion |
| South-north | - | From north-east to South-west crossing blimp’s route | Evasion |
| South-north | In front of blimp’s route | From east to west crossing blimp’s route | Evasion |
| South-north | In front of blimp’s route | From west to east crossing blimp’s route | Evasion |
| South-north | In front of blimp’s route | From south-east to north-west crossing blimp’s route | Evasion |
| South-north | In front of blimp’s route | From north-west to South-east crossing blimp’s route | Evasion |
| South-north | In front of blimp’s route | From south-west to north-east crossing blimp’s route | Evasion |
| South-north | In front of blimp’s route | From north-east to South-west crossing blimp’s route | Evasion |
Table 3: Results of blimp orientation simulator tests.
In the performance of speed up tests a set of targets cities from Rio de Janeiro state were used. In all performed tests the blimp start its mission in target 0 (Rio de Janeiro city) and reach the remaining cities in the test set. Two versions of Path Mission Control System (PMCS) programs were developed: a sequential one and parallel/distributed one. Both PMCS were developed in C program language and the parallel/distributed one use the message passaging interface (MPI) to provide communications among embedded cluster processors.
The sequential PMCS programs were executed in a single ARM processor of the cluster and the parallel/distributed ones in the prototype of an embedded cluster with four nodes. The sequential and parallel/distributed execution run times for 8, 16, 32, 64 and 128 best path targets were plotted into Table 4 and the results show a speed of execution time of the parallel/distributed PCMS version compared with the sequential one and Figure 14 compares sequential and distributed average execution times.
| Number of target cities | Sequential PCMS version execution time | Parallel/distributed PCMS version execution time |
|---|---|---|
| 8 | 0,015220 | 0,017263 |
| 0,009726 | 0,017971 | |
| 0,009472 | 0,017780 | |
| 0,011707 | 0,013452 | |
| 0,011617 | 0,016979 | |
| 0,011894 | 0,015408 | |
| 0,010868 | 0,015634 | |
| 16 | 0,013054 | 0,018544 |
| 0,017459 | 0,016001 | |
| 0,017687 | 0,018890 | |
| 0,014544 | 0,019345 | |
| 0,009148 | 0,018289 | |
| 0,014739 | 0,016878 | |
| 0,014753 | 0,017757 | |
| 32 | 0,045014 | 0,022777 |
| 0,042751 | 0,022567 | |
| 0,027554 | 0,024819 | |
| 0,046123 | 0,028603 | |
| 0,046379 | 0,025931 | |
| 0,063681 | 0,018266 | |
| 0,027486 | 0,019029 | |
| 64 | 0,083136 | 0,030058 |
| 0,114848 | 0,033641 | |
| 0,121177 | 0,033383 | |
| 0,108648 | 0,030183 | |
| 0,125328 | 0,030984 | |
| 0,126746 | 0,034585 | |
| 0,128993 | 0,031483 | |
| 128 | 0,345875 | 0,0434621 |
| 0,379085 | 0,040686 | |
| 0,289195 | 0,040260 | |
| 0,370492 | 0,046191 | |
| 0,329866 | 0,041807 | |
| 0,361274 | 0,049568 | |
| 0,355926 | 0,037894 |
Table 4: Speed up tests results.

Figure 14: Comparison of sequential and distributed average execution times.
One the first uses of airship was military ones and it is still a cheap and versatile platform. It can be used as long range surveillance and patrolling vehicle where the crew can be substituted by high definition, night vision and thermal cameras supplying a target image program with proper data. Other typical military applications should be: anticipated airborne alert system, airborne cruiser missile detection, border autonomous patrolling, mining and counter-mining operations, anti-submarine patrolling, and so many others. These kinds of missions will demand a light and small airship that will operate beyond the limits of human fatigue and stress.
As many as military issues, there are lots of civilian possible applications of an autonomous airship. It should operate to support of law and enforcement units in stealth mode operation, collecting data form communications (mobile phones calls, radio links, etc…), looking for people (using digital cameras and face recognizing systems), making the coordination of tactical operations in hard to go places.
Other important tasks should be: search and rescue, natural disasters support and monitoring, autonomous long range goods transport for difficult or without infrastructure areas, precision agriculture support, automatic natural resources data collection and monitoring, flying cranes (lifting operations), autonomous power lines inspection and monitoring, border patrolling and monitoring and so many other to be discovered. It very important to remember that an autonomous airship will not be affected by human issues that can interfere with work quality as fatigue, monotonous procedures, qualification, training and many others.
This work proposes a parallel embedded mission control framework. It uses an embedded computer cluster of new and powerful hardware to run a new and well-fitted collision avoidance system and a parallel distributed route system generator. The preliminary tests of collision avoidance, in a computer graphic environment, developed in Delphi, proved that the proposed methodology works properly for both fixed and movable obstacles. A prototype of an embedded cluster was constructed and the preliminary tests showed a better execution time of parallel/distributed version of our Path Mission Control System (PMCS). This framework will lead to more autonomy for unnamed airship making them perform completely autonomous path control of their missions, introducing a new and very cost effective work platform for both military and civilian applications.
There are many possible uses and applications of an autonomous operated airship, and many things to improve its control framework to make this kind of vehicle even more efficient, reliable and safer. One of the possible future works to this proposed framework is incorporate an 3D collision avoidance system to work together with the COLREGS72 rules and make the mission control framework even more suitable to an airship operation mode. Another issue it to extend the proposed framework range to a 360° view and so, avoid lateral possible collision form any direction from any mobile objects. And finally the introduction of an axillary wing to improve lift and make experiments to discover the possible implications in load capacity increase and the development of high altitude version of the airship (to stay at stratosphere layer) to study applications like: relay communications mobile platform, anticipated airborne warning system, remote sensing platform system, and many others that demands a stable, reliable, autonomous platform operating in long term and monotonous tasks.
This research work is supported by CNPq and CAPES.