Journal of Aeronautics & Aerospace Engineering
Open Access
ISSN: 2168-9792
ISSN: 2168-9792
Research Article - (2015) Volume 4, Issue 2
ADF or Automatic Direction Finder is one of the basic navigation machines which works based on the waves at low and medium frequencies. Tuning capacitors and selecting the appropriate circuit for each band embedded in receiver and is controlling by signals which are sending from the user from the controller section. Electromechanical systems of current receiver has reduced system performance in terms of size, weight, maintenance and accuracy of performance, and increases construction costs and the development of electronic instrumentation compared to the existing systems, the proposal design is based on electronic devices. In addition, due to the advantages of digital implementation in terms of accuracy, cost and ease of manufacturing, processing and detection of mixed signals, the choice of frequencies and the angle transmitter calculating is implemented by the digital transmitter.
<Keywords: ADF; Function; DADF
The ideas expressed in this paper are derived from the performance and internal structure of the ADF-60, with the difference that the decreased size, weight, accuracy and cost is much more affordable than ADF-60, due to the use of digital components instead of analog components and design elements of this system. First, a brief explanation about the overall performance of the ADF-60 and each of the main sections deal, which finally leads to the main circuit design, is presented in this paper. General principles of operation ADF is a relative bearing indication (θ) to a selected station is accomplished be resolving voltages induced in two directional loop antennas and a single omnidirectional sense antenna. In ADF-60 system, both loop antenna and sense antenna, balanced modulators, first rf amplifier stages and the sense /loop summing circuits are contained in the ANT- 60 antenna [1].
ADF function
When ADF function is selected, induce sense and loop voltages are summed to provide a modulated AM signal is bandpass filtered and up converted to 15 MHz first IF. After crystal filtering and IF amplification, signal is down-converted to the 3.6 MHz second IF. Following adaptation selectivity provided by another crystal filter and further IF amplification, the signal is detected and applied to the AGC amplifier, audio circuit and the instrumentation circuit [2]. When a frequency is selected on the ADF control, band logic circuit on synthesizer determines selection of one of six band pass filters on tuner. Synthesizer provides a mute pulse that disables the audio output during frequency selection, thus eliminating bothersome background noise from the audio system. The AGC amplifier controls the gain of the first and second IF amplifier. The two crystal filter determines the overall selectivity of ADF receiver. Audio from the detector is amplified and transformer coupled to the aircraft audio system. The bearing signal applied to the instrumentation circuit is filtered by an 8-section synchronous filter band pass filtered, limited, and applied to a pair of bearing phase detectors that are driven in quadrature. The phase detector outputs are filtered and amplified when using an ADF- 60B receiver, the resultant dc voltage from the amplifiers (sineθ and cosineθ) is applied to RMI indicator to drive to pointer and indicate the relative bearing, θ, to the select station. In ADF-60A receiver, the sineθ and cosineθ dc output from the filter/amplifier are applied to 400 Hz ac/dc multiplier. The resultant 400 Hz output signal are converted to standard 3-wire synchro voltages and applied to the RMI indicator to drive the pointer and indicate the relative bearing to the selected station should the receiver signal become unusable, the pointer on the bearing indicator will be parked in horizontal position [3]. The ADF- 60 receiver consists of 4 function selection: tuner, synthesizer, power supply and instrumentation
Tuner: Tuner card contains of six rf band pass filters, first and second mixer, first and second IF’s, two crystal filters, detector AGC amplifier, audio preamplifier and associated control logic. Tuner provides a demodulated bearing signal to instrumentation card, an audio signal to audio amplifier on power supply card and coherent detector lock signal to synthesizer that causes audio muting and RMI parking. If the coherent detector is not phase locked to a signal, the receiver will have no audio output and the bearing indicator will remain parked in horizontal position. An rf signal should be within ± 250 Hz of control unit detected frequency if coherent detector lock and subsequent receiver operation is to be expected.
Synthesizer: The synthesizer is a single-loop, digital frequency synthesizer, phase locked to one stable crystal oscillator. Synthesizer card proses bcd frequency information from the ADF control into a band select signal that is applied to the six rf bandpass filters on tuner. The synthesizer generates the receiver injection frequencies of 18.6 MHz (fixed, second injection) and 15.190 to 16.7495 MHz (variable, first injection) in 0.5 kHz increments. Single voltage-controlled oscillators (VCO) cover the variable frequency range, and supplied the output directly through an output isolation amplifier. The 18.6 MHz signal is divided by 18600 to provide 1 kHz modulation while operating in TONE (bfo) mode. Various control logic circuits for function selection, audio muting, indicator pointer parking and functional testing are also contained on synthesizer [4].
Power supply: The power supply consists of series regulator, timer, rectifier, loop switch, and an audio amplifier circuit. The series regulator provides regulated +18 v dc and a switching dc-to-dc inverter provides -13 v dc. The loop switch controls the B-voltage applied to the ANT-60 loop circuits. The audio circuit provides 100 mW output into 600 ohm load for the aircraft audio system
Instrumentation: Instrumentation consists of an 8-section synchronous filter and associated commutating switches, two quadrature-driven phase detector, oscillator, 90 degree phase shifter, and function test switch circuits. The instrumentation circuits convert the sinusoidal bearing signal from the tuner into 0 to 8 v dc sineθ and cosineθ outputs to drive RMI indicator (θ is relative bearing to the station from tha aircraft)
Note: ADF-60A instrumentation consists of add ADF-60B instrumentation circuits plus an ac multiplier and a synchro driver.
Auto navigation system (ADF), is a low band frequency navigation system (l band). The core of the system is a radio receiver in the frequency range 190-1750 Hz and covers loop and fixed antennas. The purpose of this system is to detection narrowband transmission in this frequency range and to identify the direction of the transmitter in the horizontal plane. Given that electromechanical systems in present receptors reduces system performance in terms of size, weight, maintenance and accuracy of performance, and increases construction costs, and due to advances in electronics instrumentation as compared to designing time of existing systems, the proposed scheme is based on electronic devices. In addition, due to the advantages of digital implementation in terms of accuracy, cost and ease of manufacture, processing and detection signals, including mixing, choosing frequency, calculating digital transmitter angle, it is implemented digitally.
In general, the relationship between the received signals by ring antenna, according to the transmitter direction is as follows:
Sr(t) = ASi(t)sin(θ) (1)
In this connection, Sr(t), the transmitter signal at the antenna and Si(t), is the signal generated at the output of the circular antenna. Ө shows the angel between the transmitter direction and the vertical axis to the loop. A coefficient is a function of the surface area of the ring, the round number, polarization and frequency of the signal which is received. As the relationship when the transmitter is placed at the center of a circular antenna, is equal to zero and if its axis becomes perpendicular is equal to 90 degrees. But when two similar rings become in the perpendicular direction, the received signal is related to the following form:
Sr1 (t) = ASi(t)cos(θ) (2)
Sr2 (t) = ASi(t)sin(θ) (3)
In the above relations, Sr2 (t), Sr1 (t) are produced signals the circular antenna outputs which are vertical. Here Ө is the angle between the transmitter and the perpendicular axis to the first loop antenna. Signals received by the orthogonal loop antennas, at first are strengthened using RF amplifiers with similar interest. Considering the frequency range receivers, appropriate operational amplifiers for making waves with equal advantages can be used. If necessary, variable attenuators, flowing strengthening can be used to compensate the difference of potential interest. The received signal after amplification by loop antennas, inters into hybrid networks which are shown. The network is designed so that the input signal port A and port C, D signals with equal amplitude and phase difference of 90 degrees is coupled. In other words coupled signals at ports C, D relative to the input signal port A must be respectively, zero and 90 degree phase difference. Similarly, signals from input ports B to output ports C, D are coupled, respectively, should have a phase difference of 90 degrees and zero degrees. This hybrid network can be implemented; using passive components consist of transformer Or ActiveX components including operating amplifiers Figure 1.
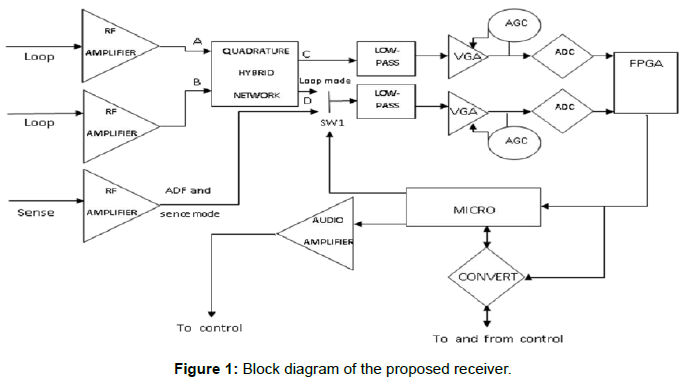
Figure 1: Block diagram of the proposed receiver.
Received date: signal from the sensor antenna is enhanced by other RF amplifier. While the received signal from loop antennas and the sensor antenna are shown using equations (1), (2) and (3). Assuming that the sent signal by a cosine signal with angular frequency ω transmitter is considered, with implying signals from loop antennas to hybrid network input ports, according to the above noticed function to the network, it can be shown that the output signal at the output ports C, D can be displayed by the relation
 (4)
(4)
 (5)
(5)
According to these relationships, it is observed that radio transmitter angel or θ angle can be specified through the phase comparison signal coupled to one of the LAN ports hydride phase sensor signal from the antenna. In fact, using of hybrid networks, information about the angle of the radio transmitter which was hidden in amplitude and phase of the received signal from loop antennas related to signal received from the antenna sensor is derivable only by comparing the phase of the output network with the received signal from the antenna sensor. Due to the variable gain amplifier to adjust the amplitude of the input signal to analog to digital converter within the proper scope in the next class the data will be lost. Given that only the hybrid networks signal phase output information and sensor antenna is adequate for determining the angle of the radio transmitter, the signal amplitude changes will have no effect on the determination of the angle. If LOOP mode work instead of ADF mode, cannot use from the sensor antenna like old receivers, and detect angle of the radio transmitter only by comparing the output phase hybrid network with each other. So Sw1 switch is located at the at the output port D in a hybrid network. In ADF mode signal sensor antenna and in LOOP mode, port D output signal, hybrid networks, will pass to compare their phase with the output signal phase C port network. In ANT mode that the receiver acts as the only detector of radio signals, signals SW1 switch will pass sensor antenna for disclosing. General block diagram of this circuit is shown in Figure 2.
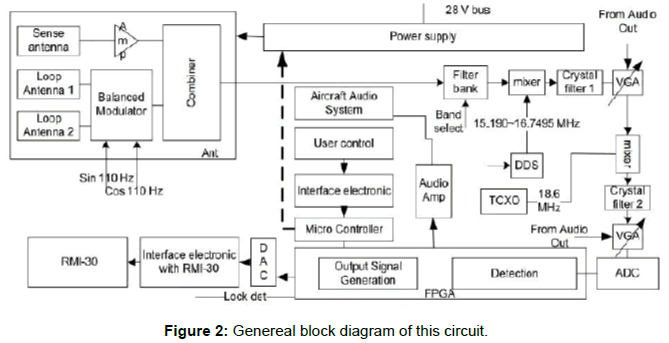
Figure 2: Genereal block diagram of this circuit.
Electromechanical systems of current receiver has reduced system performance in terms of size, weight, maintenance and accuracy of performance, and increases construction costs and the development of electronic instrumentation compared to the existing systems, the proposal design is based on electronic devices. In addition, due to the advantages of digital implementation in terms of accuracy, cost and ease of manufacturing, processing and detection of mixed signals, the choice of frequencies and the angle transmitter calculating is implemented by the digital transmitter.
Special thanks from Dr. Mahmud Sam Kan that help us during this research.