Journal of Aeronautics & Aerospace Engineering
Open Access
ISSN: 2168-9792
![]() +44-77-2385-9429
+44-77-2385-9429
ISSN: 2168-9792
![]() +44-77-2385-9429
+44-77-2385-9429
Research Article - (2015) Volume 4, Issue 2
The scope of the present work was to design, build and fly test a solar UAV, Sun Falcon 2 for long endurance day and night flight operations. A software program was written to design the UAV with appropriate aerodynamic attributes, power requirements and other flight mission constraints to keep the vehicle airborne for multi day and night operations. More specifically the design called for an least 12 hours of endurance during the day with solar panels deployed to absorb sufficient daylight energy to top up the on board batteries for the complete subsequent night flight mission. With Sun radiation levels averaging at about 6003 W/m2 during the Saudi day it was not too difficult to conform to multi day and night design requirements. The prototype Sun Falcon 2 has already been built and flight tested with satisfactory performance records satisfying the design criteria.
<Keywords: Unmanned Air Vehicle; Fly testing; Designing
This article reports on the second leg of the collaboration between the students and the staff of the Tokai and King Abdul Aziz universities tasked to design long duration UAVs. The present work, thus is followed on from the first design of Sun Falcon 1[1] which was successfully designed and flight tested at both locations Tokai University and King Abdul Aziz University. While solar powered aircraft are not unknown to the industry especially with the famous Gossamer [2] version of vehicles flying ever higher, heavier and longer to confirm the viability of solar power as a reliable means to power airborne vehicles. Elsewhere German Akaflieg group coming up with such large sized UAV’s as the VELA2, NACRE and AMPAIR have proven that a variety of different UAV configurations can be flown but few as pointed out in Reference 1 and by Noth and Siegwart [3] UAVs have demonstrated the continuous day/night capability using the solar power
The overall design procedure demands an accurate weight estimation which can be supported comprehensively by the configuration aerodynamics throughout the complete itinerary of the flight mission. An even more demanding challenge is the adequate supply of the power dispensation especially during the sundown hours. The methodology is heavily based on the principle that the on board batteries would be sufficiently charged during the day operation by the on board solar panels to cover the power requirements during the night hours. Obviously there is an iterative process which optimises the weight against the aerodynamic loads and stability as well as the available power demands [4].
In terms of the actual design and performance specifications, the Sun Falcon 2 was estimated to have a 200 g weight with a continuous flight capability lasting at least 5 days (120 hours) with a cruise velocity of 30 km/h. It will have a climb rate of about 2 m/s operating by an electrical motor powered by a battery replenishable by solar panels. It will take-off in a normal fashion from an appropriate ground terrain and remain airborne at an altitude of about 500 m. A typical flight mission would then require the UAV to climb to a maximum height of 500 m, remain airborne continuously for 120 hours loiter at that altitude and ten descend to a prescribed location [5]. The final design will be subject to the safety regulations of the European Aviation Safety Agency and Certification Safety of Very Light Airplanes (CS-VLA).
Power required to maintain uniform flight in cruise, is one of the most important parameters in sustained flight over a long period of time. This parameter in turn is dependent upon the aerodynamic performance of the vehicle, particularly the drag,
 (1)
(1)
Where
 (2)
(2)
 (3)
(3)
 (4)
(4)
 (5)
(5)
Where is the Oswald’s efficiency factor and Re is the Reynold’s number
According to the induced drag and viscous drag calculation, the total drag can be obtained by equation 6
 (6)
(6)
Since the required thrust is equal to the drag, the require power can be calculated from equation 7
 (7)
(7)
Along with the aerodynamic performance of the vehicle the weight of the components of vehicle must be obtained with extreme accuracy. The total weight of the vehicle, which must in all cases be
less than the aerodynamic lift  given by the equation:
given by the equation:
Total Weight = Weight of Batteries + Payload + Weight of Solar Cells + Weight of Airframe (7)
The weight of solar cells and the weight of airframe will be calculated from the following two equations:
Weight of Solar Cells [kg] = Solar Module Area *0.8 (8)
Weight of Air frame [kg] = (9)
(9)
Another important feature of solar based flight is to have an accurate estimate of the energy generated from the solar cells which must exceed the energy requirements of the vehicle.
Energy needed is calculated from adding the energy needed from motor and energy needed to charge th-e batteries.
Energy needed at Day[wh] = Energy motar [W. h ]+ Energy to charge battery [Wh]
And the power required can be calculated from the equation:
Where energy needed for motars and energy to Charge battery can be calculated by the equation
Energy to mortar = Required power [w]* Day time [h] (10)
And the power required can be calculated from the equation :
Energy to charge battery [Wh] =  (11)
(11)
The length of day the day time is assumed to be 12 hours in this analysis, and the number of batteries can be obtained from were 13 in the next section. From the batteries specifications in Table 1 the capacity of battery and volt can be found
| Description | Amount | Unit |
|---|---|---|
| Wing span length | 7.5 | [m] |
| Aspect ratio | 19.66 | -- |
| Total amount of global | 6006 | [W.h/m2] |
| radiation | ||
| Chord at root | 0.4 | [m] |
| Cruise speed | 33.4 | [km/h] |
| Altitude | 500 | [m] |
| Efficiency of the propeller | 0.8 | -- |
| Efficiency of the motor | 0.85 | -- |
| Efficiency of the solar | 0.23 | -- |
| module | ||
| Predicted Weigh of the | 5 | [kg] |
| airframe | ||
| Predicted Weight of the solar | 2.06 | [kg] |
| module | ||
| Predicted Weight of the | 3.69 | [kg] |
| battery (Lithium ion) | ||
| Predicted Weight of the plane | 10.86 | [kg] |
| Power during cruise | 70 | [W] |
Table 1: Sun Falcon 2 Design Parameters.
The above energy required has to be balanced against the energy available from the solar cells. The energy generated by solar cell is given by equation 12:
Energy generated by Solar, cell [Wh] = (12)
(12)
Where Ωr is the radiation vector obtained from the Jeddah Met Office and S is the wing area and
is the solar cell efficiency.
Where minimum capacity and charging current can be found from the battery specifications and the number of batteries required can be obtained from equation 13
 (13)
(13)
The total energy and single battery energy can be calculated from equation 14 and 15 respectively:
 (14)
(14)
 (15)
(15)
The time needed to charge batteries is given by the following equation:
 (16)
(16)
Figure 1 displays an EXCEL based SUNDOME flow chart diagram, in which the individual compartments are updated as the iterative design procedure is advanced to converge towards the final design. It has the ability to iterate between configuration aerodynamics, weight, energy and power requirements as well as the critical time to energy absorption from the daylight operations. The mission parameters are introduced into the mission specification module which feeds such information towards the aerodynamics module which uses such basic performance coefficients as the lift, drag and configuration geometry to arrive at the power and energy generations and other motor specifications. This information is in turn used in the power plant design to arrive at the solar cell and battery weight, area and power requirements. A final decision module interrogates whether the available energy and weight quantities satisfy the appropriate constraints and meet the critical time needed to replenish the battery charge for night operation in a repetitive manner. If the constraints are not satisfied than the frame geometry in terms of the aspect ratio and airframe weight is updated to repeat the convergence iteration.
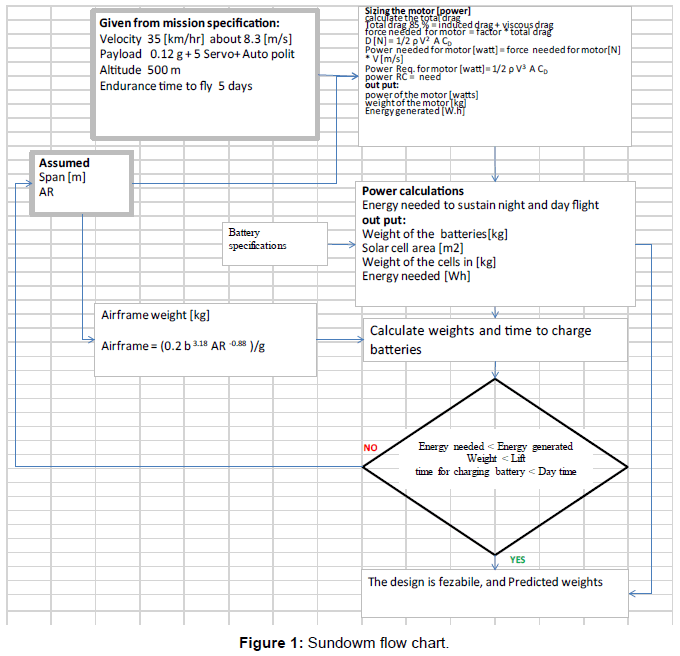
Figure 1: Sundowm flow chart.
Typical configuration geometry, aerodynamics, mission specification, and other energy and power requirements as well as battery and solar power requirements at any instant as they are updated during successive design iterations is shown in the Figure 2.

Figure 2: Unit Excel Sheet.
The configuration which was used to provide various geometry, weight and other aerodynamic characteristics is shown in Figure 3. The wing aerofoil section is based on an S8037 airfoil without a fuselage having an inverted V tail configuration supported by a tail boom which is extended forward for an appropriate c.g location. Detailed geometry and other aerodynamic features of the final design are included in Table 1.
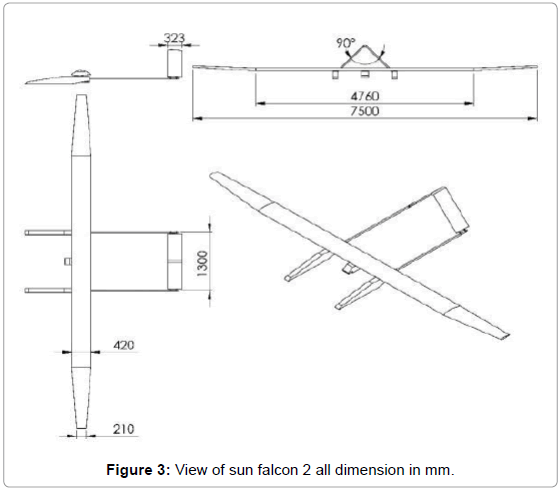
Figure 3: View of sun falcon 2 all dimension in mm.
The UAV was controlled to loiter within a specified airspace defined say by a number of prescribed boundary points identified by points 1 to 13 in the flight path as shown in Figure 4.
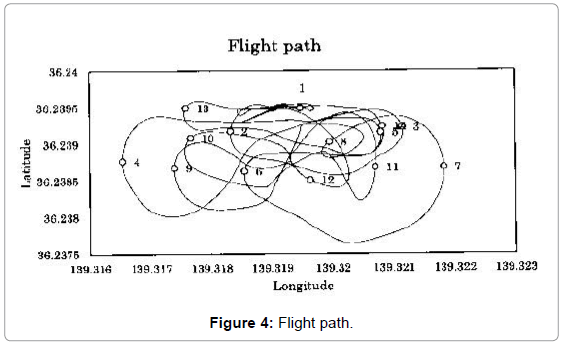
Figure 4: Flight path.
The stability and control feed-back system on board the UAV would manipulate the control surfaces to provide just the correct incremental acceleration at each step to advance it towards the next point on the trajectory. The incremental acceleration as discussed by Park et al. is obtained from the relationship:
With reference to the Figure 5.
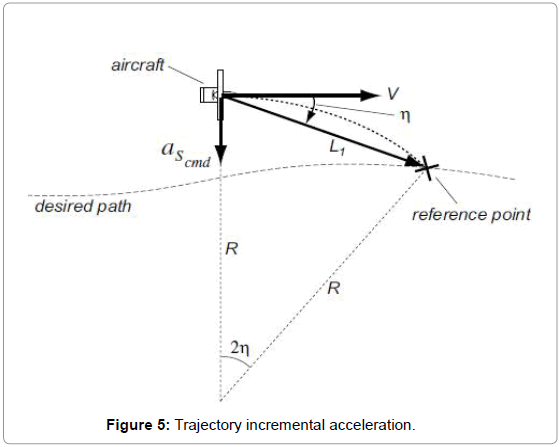
Figure 5: Trajectory incremental acceleration.
The incremental distance to next location on the point is repeated step by step until the antire trajectory is completed bring the UAV back to the point of the origin. This entire flight path can be repeated many times over to maintain the craft within the permissible airspace for the entire duration of the many days of flight.
Figure 6 shows the photograph of the SUN Falcon 2 during its augrational flight in May 2015. The model was first flown under battery power and the UAV remained airborne for at least 30 minutes. It was controlled to fly within a specified airspace. After at least 30 minutes of flight, the UAV was flown singularly under power scooped up from the sunlight. It was able to fly without difficulty from the reserved power.
Figure 6: Sun Falcon 2 flight test.
Sun Falcon 2 has been designed from the lessons learnt from the successful designs of Sun Falcon 1. Suitable temperature models have been used to assess the functions of the solar cells and their inevitable impact on the power /unit area distribution and the weight estimates. Meticulous design procedures with fast turnaround times, were devised to arrive at the most optimum design for the multi day operation of the Sun Falcon 2. The flight of the prototype Sun Falcon 2 demonstrated the successful design strategies adopted for the continuous flight vehicles. The first tests albeit for short duration of time demonstrated that the UAV could operate from the power reservoir recovered from the recharging of batteries from the power cells. The first flights were accomplished at Tokai University, Japan where the energy recovery source from a maritime climate is not as supportive as the more appropriate Jeddah desert climate.
This project was funded by the Deanship of Scientific Research (DSR) King Abdulaziz University, Jeddah, under the grand No. (431/009), the authors, therefore, acknowledge with thanks DSR technical and financial support, furthermore the authors would like to express their gratitude and appreciation to Tokai University for their technical help and support.