Journal of Geology & Geophysics
Open Access
ISSN: 2381-8719
ISSN: 2381-8719
Research Article - (2014) Volume 3, Issue 1
Several geophysical techniques are available for the investigation and characterization of shallow subsurface. Most commonly used are electrical methods, seismic refraction and reflection methods, multichannel analysis of surface waves, gravity, magnetic, electromagnetic induction and ground penetrating radar. Mars is the one of the terrestrial planet, under discussion from several years due to interesting facts obtained from surface features including the evidences for the presence of water. Surface features on Mars include plans, mountains, impact crater, lava flows and dust cover. The possibility of life on the Mars is a question mark which is yet to be defined. In this article GPR technique is proposed for planetary missions to explore the subsurface of Mars. Ground Penetrating Radar (GPR) is a recent technology which provides high resolution picture for near surface structures. Due to the small size, light weight, high resolution, and simple operational system the GPR is supposed to be a best tool for the exploration of near surface features and hydrology of Mars. Launching a planetary mission at Mars with GPR could provide the information about the subsurface structures. This information could be used to define many question marks about red planet.
Keywords: GPR technique, Planetary sciences, Mars
Ground Penetrating Radar (GPR)
Earth provides the only ground-truth for other terrestrial planets and satellites including Mars, Venus, Mercury and Moon. Surface features and processes observed on these planetary bodies are interpreted by correlating them with those observed on the Earth. In this proposal, the Ground Penetrating Radar (GPR) technique is introduced to explore the subsurface of Mars. GPR should be an essential part of NASA’s prospecting for Martian exploration for the Martian subsurface characterization. GPR system can give information about subsurface stratigraphy with high resolution [1]. The history of GPR is divided into four stages of development. The first stage was characterized by initial equipment experimentation. Hulsmeyer [2] in 1904 used EM energy for the exploration of buried metal objects while Lowy in 1911 used EM energy for measuring depth of subsurface interfaces [3]. Stern in 1930 used GPR technique for geological mapping. Over the next three decades there was very little activity in GPR, mainly due to lack of application identification. In 1960 the radar technology was first time used for subsurface imaging. In 1979 the GPR system was used for measuring the ice thickness [5,6], which is an important aspect for current proposed project. GPR provides high resolution pictures for near surface structures. It is also known as Georadar, Subsurface Interface radar or Geoprobing radar. In GPR electromagnetic (EM) signals are sent into the ground. When these signals encounter changes in characteristics of subsurface materials, they are then reflected back to the surface where they are recorded by a receiver as shown in Figure 1 [7]. Data obtained from GPR come in the form of two-ways travel time. Other observations involve the wavelength and the amplitude of reflected waves. Variations in these parameters are interpreted either as a change in subsurface material or as compositions of different layers [8]. EM-waves penetration into the ground and its reflection from subsurface boundaries depends upon water content, porosity, dielectric property and density of rocks [9].
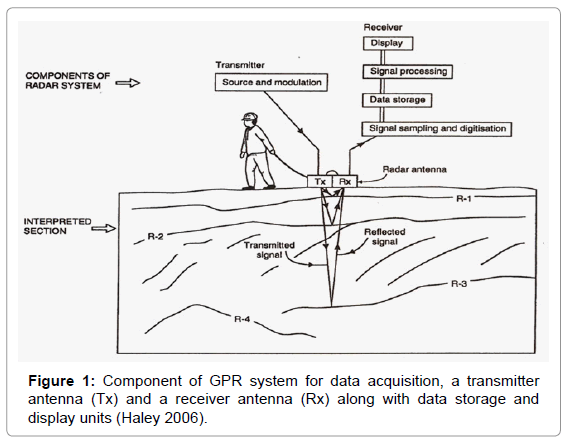
Figure 1: Component of GPR system for data acquisition, a transmitter antenna (Tx) and a receiver antenna (Rx) along with data storage and display units (Haley 2006).
GPR Instrumentation and data acquisition
GPR is a newly emerging technique; therefore, there are many modern GPR instruments with different configurations, but all of them consist of a control unit, an Electro Magnetic wave source (transmitter), 2 antennas, receiver and data storage and display system [3]. Different transmitters can produce waves of different frequencies ranging from 1 to 1000 MHz. GPR data is acquired in different modes, one of which is “Reflection mode-single-fold coverage” as shown in Figure 2.
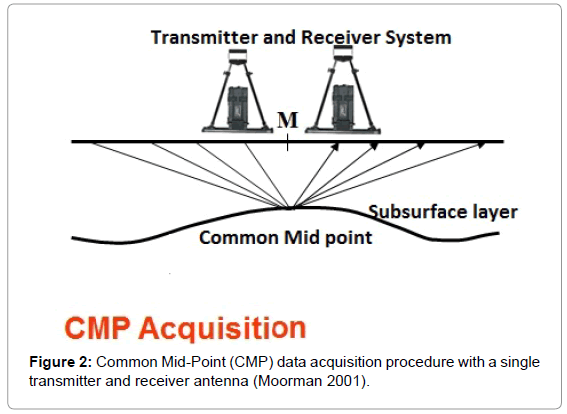
Figure 2: Common Mid-Point (CMP) data acquisition procedure with a single transmitter and receiver antenna (Moorman 2001).
In the CMP method, a single transmitter and receiver are moved along the ground while keeping a fixed configuration and data acquired versus position [10]. Other survey modes are Multifold CMP sounding, 3DGPR survey and Transillumination survey. Field setup for Transillumination mode is shown in Figure 3.
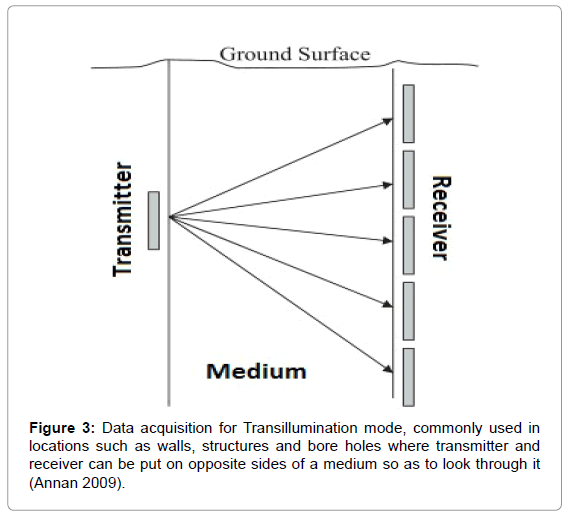
Figure 3: Data acquisition for Transillumination mode, commonly used in locations such as walls, structures and bore holes where transmitter and receiver can be put on opposite sides of a medium so as to look through it (Annan 2009).
In Multifold surveys many measurements are made at a common midpoint for particular transmitter and receiver separations while in 3D, single fold mode is used along a grid. In Transillumination the mode transmission of signals through a volume is observed this mode is used to observe rock stabilities [10].
GPR is the most emerging shallow geophysical technique with its endless applications in different fields, like in geology to map the bed rock and it is also used for mineral exploration while in civil engineering it is broadly used for geotechnical investigations and to explore the buried engineering structures [11]. In hydrology, GPR technique is used to determine water level, solution features and glacial structures.
Depth of investigation is a very important parameter for any geophysical technique. For GPR depth of investigation is dependent upon frequency of the waves (which can be control) and characteristics of subsurface material, details are given in Table 1. Though frequency can be control but it is quite difficult to select frequency range for a GPR survey because low frequencies have long wave lengths can penetrate deeper while high frequencies with shorter wave length can only penetrate to shallower depths [8]. The depth of investigation can be increased by using low frequencies (25 - 100 MHz) if subsurface material is not highly conductive, for example zones with sand and granite. Highly conductive materials like shale and clay can absorb GPR signals and decreases the depth of penetration [12].
GPR for Mars
Due to the small size, light weight, high resolution, and simple operational system the GPR is supposed to be a best tool for the exploration of near surface features and hydrology of Mars. Kim and colleagues [11] recommended GPR technique for Martian Missions for the exploration of near surface stratigraphy, ice and mineralogy. The depth of investigation for GPR can be less than a meter to few hundred meters more therefore; an important aspect of GPR mission would be to explore subsurface layers as deep as possible. Subsurface layers can be identified by their corresponding dielectric properties (Table 2). This information can provide a basic tool to construct real geological history of Mars.
GPR Missions for Mars, NASA Instrument Development
NASA instrument development program developed a small GPR system for mapping subsurface stratigraphy through a rover platform for Mars and other planetary applications. According to NASA, GPR would be an essential part of rover missions. A model for rover with GPR and its data acquisition is shown in Figures 4 and 5 respectively (For details please see Kim et al. [1] “Concepts and Approaches for Mars Exploration”)
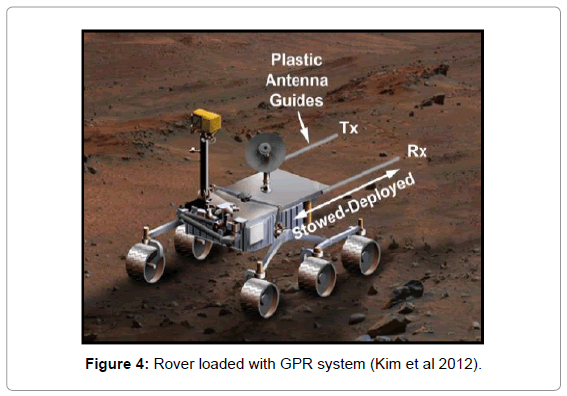
Figure 4: Rover loaded with GPR system (Kim et al 2012).
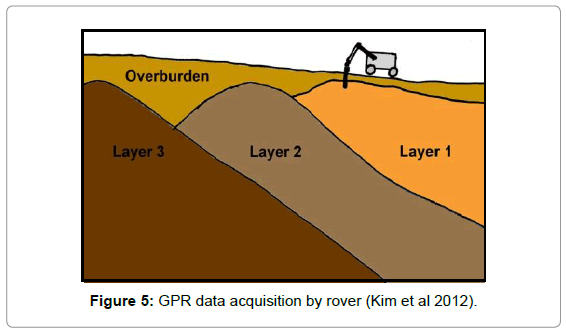
Figure 5: GPR data acquisition by rover (Kim et al 2012).
Best location for rover with GPR
In current project main objective is to get information for maximum possible depth therefore the deepest location will be the best one for GPR mission. Figure 6 indicates elevation map of Mars, which highlighted the highest and lowest point on the Mars. On the Earth sea level is a reference point for elevation measurement of any location but on Mars there is no sea level. On Mars, Mars areoid is datum or reference point for elevation which is equipotential surface of the Goddard Mars Gravity model.
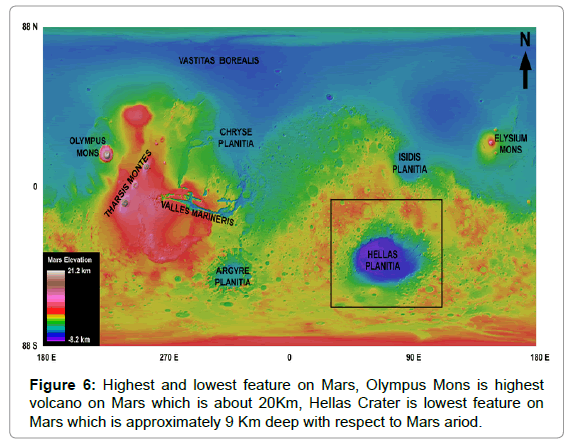
Figure 6: Highest and lowest feature on Mars, Olympus Mons is highest volcano on Mars which is about 20Km, Hellas Crater is lowest feature on Mars which is approximately 9 Km deep with respect to Mars ariod.
Hellas Crater is selected for current project. Hellas Impact Crater (also known as Hellas Planitia) is an enormous impact crater in the southern hemisphere of Mars. It is about 2,300 kilometers (1,400 miles) in diameter and about 9 kilometers (5 miles) deep. It is the largest impact crater on the planet. Ejecta from Crater provide information about 9 Km which can be further investigated further with GPR.
Hellas crater
Hellas is the largest well-preserved impact structure on Mars and spans more than 2300 kilometers across in the southern hemisphere, a region that is much more heavily cratered and higher in average elevation than the northern hemisphere. The western part of the Hellas basin contains the lowest point on Mars, about 8.2 kilometers below the Mars datum (ariod) or Martian “sea level”. The formation of the impact structure is believed to have taken place in the early Noachian epoch. Hellas has been subject to infilling by aeolian, fluvial, glacial, and volcanic materials. Hellas region have shown variety of geologic processes including impact craters, lava flow and dust layers, due to which original surface of Hellas changed over the time. Seven geomorphic material units on floor of Hellas basin are collectively called Hellas assemblage. Two main assemblages on Hellas are rim assemblage (Above 5800m) and planitia assemblage (Below 5800m) [13].
Selected regions for GPR mission
As objective for this part of project is to explore region in which rover can collect data in 5Km radius, therefore the selected region is shown in Figures 7 and 8.
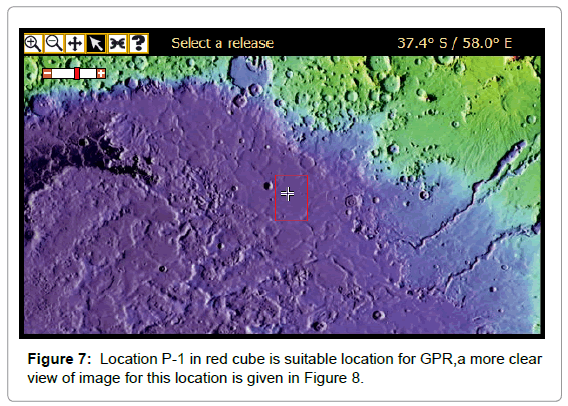
Figure 7: Location P-1 in red cube is suitable location for GPR,a more clear view of image for this location is given in Figure 8.
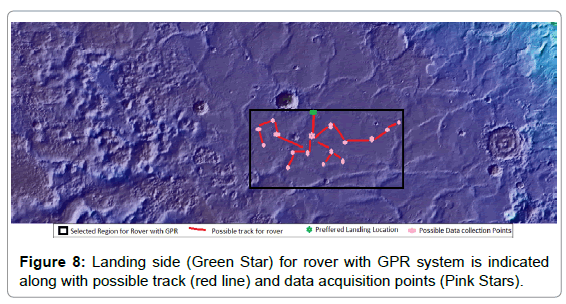
Figure 8: Landing side (Green Star) for rover with GPR system is indicated along with possible track (red line) and data acquisition points (Pink Stars).
It can be observed from this figure that selected location is best for Rover with GPR because of 2 reasons depth of investigation and maximum coverage for surface features and accessibility of data collection with in 5 Km radius. Part of land selected for geological mapping is shown in Figures 9 and 10.
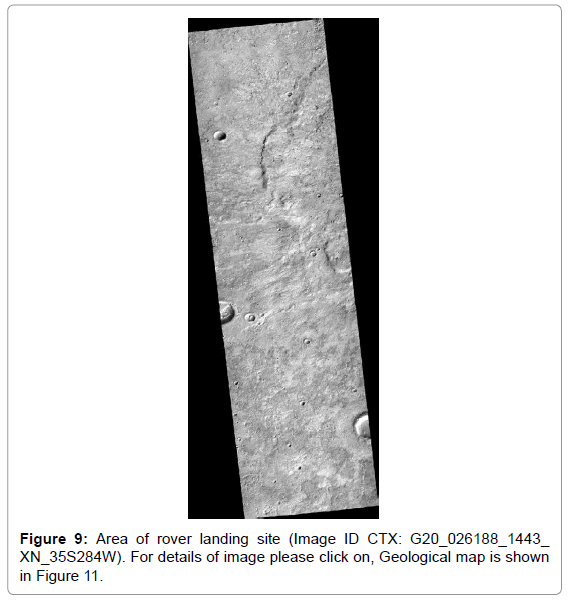
Figure 9: Area of rover landing site (Image ID CTX: G20_026188_1443_ XN_35S284W). For details of image please click on, Geological map is shown in Figure 11.
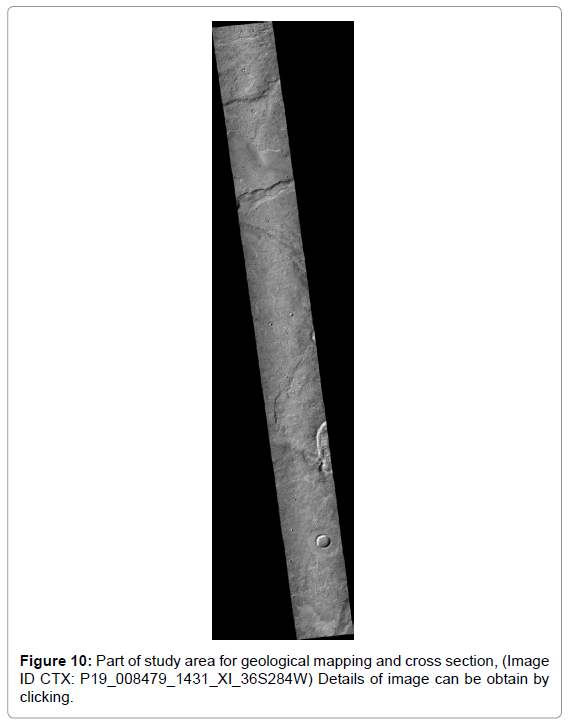
Figure 10: Part of study area for geological mapping and cross section, (Image ID CTX: P19_008479_1431_XI_36S284W) Details of image can be obtain by clicking.
In current project main objective was to get information about subsurface layers therefore location with minimum obstacles is selected for GPR data acquisition. The possible features for Figure 9 are mapped and shown in following section. However geological map and cross section is prepared for image 10 due to the presence surface features in this region.
Figure 11 and 12a-12c maps of all observed features along the landing site of rover. Unit 1 represents elevated and rough area while unit 2, 3 are at relatively low elevation, Unit 6 and 4 are lowest region in this part of study area. Unit 5 is indicating land slide from unit 1 and 5 is youngest in this part. All units in this figure belong to Hesperian age details of deposits are given in following section.
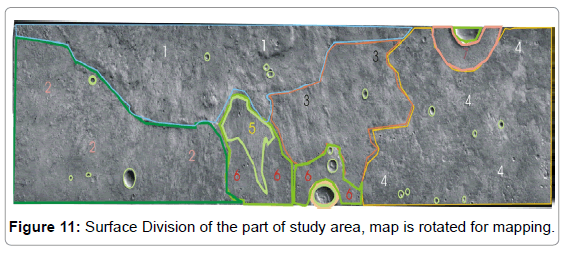
Figure 11: Surface Division of the part of study area, map is rotated for mapping.
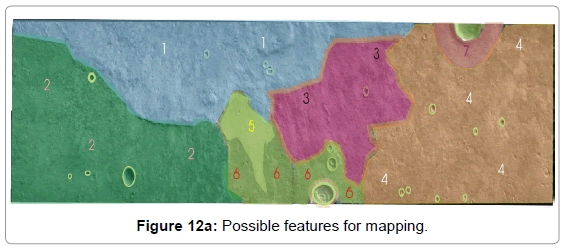
Figure 12a: Possible features for mapping.
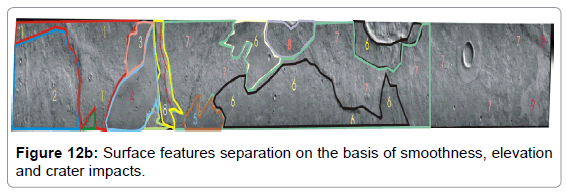
Figure 12b: Surface features separation on the basis of smoothness, elevation and crater impacts.
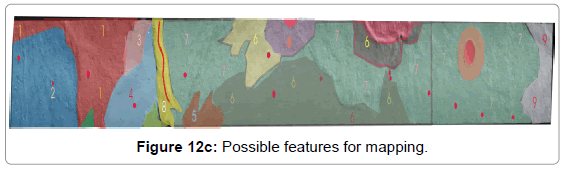
Figure 12c: Possible features for mapping.
Another interesting region with significant geological features is selected for mapping, which is discussed in following section. Area selected for rover with GPR mission is best location in a sense that it contains many surface features in its surrounding for rover images as well as it is feasible for GPR data collection in terms of topography and maximum depth of investigation.
Interpretation
Proposed area is the part of interior of Hellas crater and is close to its Eastern rim. Interior of Hellas is divided into many units which are known as Interior units, these includes Hummocky interior unit (Hih), Knobby interior unit (Hik) and Smooth interior unit (His). Area selected for GPR mission belongs to Hellas interior units of Hesperian age. Areas selected for geological mapping is part of smooth interior (His) unit which is moderately cratered. Two principle deposit occurs along this part of Hellas planatia: (1) Extensive, discontinuous annular band of plains along eastern margin of basin interior marked by smooth, locally undulating deposits that partly bury wrinkle ridges; gradational with interior plateau and hummocky units; cut by Dao and Harmakhis Valles. (2) Irregular and accurate patches in central and western Hellas planitia; resembles first occurrence but without wrinkle ridges; generally gradational with interior and area. In Figure 13 features of Hesperian age are mapped these features includes craters, smooth plains (Unit 4, 5, 6, 7, and 9), rough mass wasting and crater mantle (Unit 8 and area in surrounding of craters), Units 1, 2 7 and 9 are covered with dust layer. Unit 1, 6 and 8 are relatively elevated regions while unit 7 is representing the relatively smooth area. Unit 9 is brighter region as compare to other parts of study area.
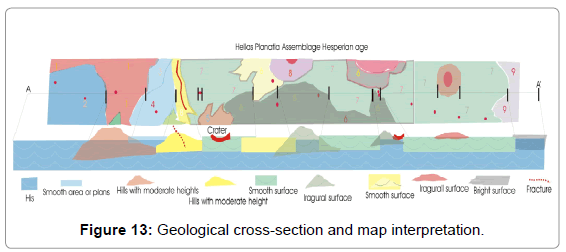
Figure 13: Geological cross-section and map interpretation.