Journal of Aeronautics & Aerospace Engineering
Open Access
ISSN: 2168-9792
ISSN: 2168-9792
Research Article - (2015) Volume 4, Issue 3
In safety critical systems such as aerospace, it becomes more important since the non-performance of the system as per the requirement may lead to a catastrophe. Also, the work-around to modify the design as per the requirements, generate code, obtain safety clearance from the authorized agency before porting to the target is very time consuming and a cumbersome approach. In this paper, we propose a model-based approach to improve the performance of the software algorithm and optimize the pitch trim movement before porting the code to the target. The effectiveness of the approach is demonstrated with a case study of aerospacedomain. The approach encompasses the aircraft sub-system dynamics and the software which operates the sub-system. The analysis of the functionality with performance provides a high level of confidence in the software that is to be ported on to the target. The test crew can provide feedback on the overall functionality and performance of the software at the model-level. The proposed approach not only increases the efficacy of the process but also provides higher safety assurance earlier in the process. Pitch-trim is a critical sub-system of the aircraft which is modeled and the improved software algorithm is incorporated into the model for analyzing the overall functionality and performance of the sub-system. Based on the model simulation and analysis result, the changes in the algorithm were made and finally ported onto the target. The performance and functionality of the pitch-trim sub-system on the aircraft was as per the simulation analysis results indicating the correctness of the model and the proposed approach.
<Keywords: Safety critical system; Software algorithm performance; Pitch trim analysis; V&V
In aeronautics and automotive industries, verification and validation procedure (V&V) is an important part of safety critical system. V&V phase performs verification and validation at various activities such as unit-level, integration-level, hardware-software integration level, system level and finally at the aircraft level. Conventional V&V approach amounts to a lot of time. In order to reduce this time and make the V&V phase effective novel techniques are being adopted. Formal methods, model-based engineering, and requirements-based V&V are few such techniques being adopted to make the process effective.
Modelling and simulation are very important tools of systems engineering that have now become a central activity in all disciplines of engineering and science. Not only do they help us gain a better understanding of the functioning of the real world, they also play a key role during the design and analysis of new system design. Model-based approach enable in analyzing the system behaviour with respect to the project requirements earlier in the process. Modelling and simulation also help in analyzing systems accurately under varying operating conditions. Simulink is one of the popular modelling software capable of simulating, and analyzing dynamic systems [1,2].
Model based development provides a development process from requirements to code, ensuring that the implemented systems are complete and behave as expected. The problem of effectively modeling and analyzing software algorithm to realize functional and nonfunctional requirements is an important research topic. The significant benefits of such work include detecting and removing defects earlier, reducing development time and cost while improving the software algorithm [3-5].
This paper proposes an approach to improve the engineering process by analyzing the performance of the system at the model-level rather than at target level. In order to validate the system performance a very realistic system model needs to be designed. The case study of the aircraft pitch trim system is used as an example to demonstrate the approach. Aircraft pitch trim simulation model using Simulink allows the dynamic analysis of pitch trim for various test environments as per the requirements. The tests which were conducted at system level can now be tested at model level. This modification in the process improves the overall quality of the software as the design flaws can be detected earlier in the phase. Model-based approach has the capability to simulate scenarios as per the user requirement. The simulation model provides results to analyse software algorithm for its functionality and performance [6].
Efficient methods are required for improving the software algorithm to allow early performance evaluation of completeness and correctness. Law et al. [1] present a specific level model based approach to improve the performance of software algorithm. This approach/ analysis is used to improving the performance of software algorithm before implementing into the target. Importance of this method is to check functional and non functional activities of the model in very early stage. Matlab simulink tool help library is very useful to generate the Simscape model. Help menu provides lot of examples related to dynamic system model. For example, to model a small dynamic system of car, Figure 1 represents a simple model of a car suspension. It consists of a spring and damper connected to a body (represented as a mass), which is agitated by a force. The model parameters, such as the stiffness of the spring, the mass of the body, or the force profile, and view the resulting changes to the velocity and position of the body [3] can be varied.
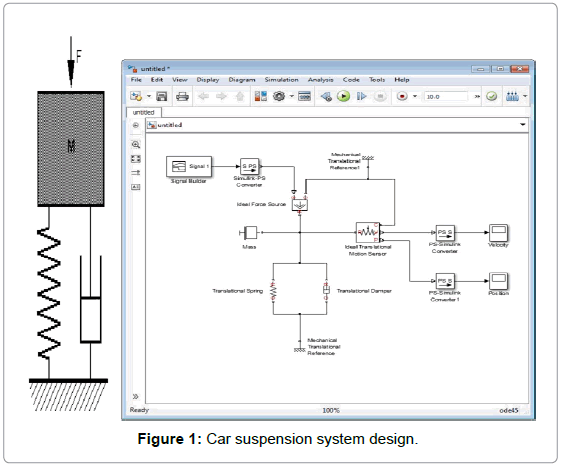
Figure 1: Car suspension system design.
The approach is executed by modelling the mechanical design in Matlab Simulink tool and the source code is imported to the model. Comparing simulation results to original model, source code and check, verification cases and procedure (VCP) documents. Matlab Simulink Simscape tool provides complicated Aircraft dynamics systems [5].
Importance of the model-based approach is to reduce gap between source codes to target analysis. Model-based approach is an evolutionary step in the software field that changes the focus of software development from code to models. The model can be used to study the performance impact of different modes and/or configuration alternatives under different workloads, leading to advice for improving the system and software algorithm. Performance evaluation of a model may be done by simulating the model and collecting results [6-9].
Flight control systems on aircraft have evolved from mechanisms that warped the wing to change its lift characteristics, to the three-axis positive aerodynamic controls (elevator, rudder, ailerons) used on almost every airplane flying today [1]. Aircraft trim systems range from simple metal tabs that can only be adjusted on the ground to complex systems of in-flight adjustable tabs. Ground-adjustable trim tabs are thin metal tabs on the trailing edge of an elevator, to achieve trim in one specific mode of flight, usually cruise. In any other mode, such as climb, slow flight, or descent, the aircraft will be out of trim. Simple in-flight adjustable pitch-trim devices are generally cable operated and work in one of several ways. One method is to vary the angle of a small tab attached to the trailing edge of the elevator. Changing the angle of the trim tab changes the aerodynamic neutral point of the elevator [10].
Pitch trim movement is control the aircraft nose down/up movement. For the pitch up command aircraft goes nose down and vice versa for pitch down command. This commands generated by pilot/co-pilot or automatic flight control system. Every aircraft pitch trim movements have some limitations, once it’s crossing that level, it will alert the warning signal to the pilot.
Proposed approach
The proposed approach follows a sequential well-defined pattern consisting of the requirements capture, model the eletro-mechnaical system, embed the command and monitor algorithm, and generate the test scenarios to demonstrate the functionality and performance. This approach is shown in Figure 2. The approach starts with understanding the system, and collecting the requirement specification for the system. After the requirements are captured, the system is modeled. The model consists of electrical-mechanical components with the algorithm implemented in the model. The model is validated for its correct and complete implementation against the aircraft data. The functionality and performance of the system is validated by translating the embedded test scenarios to model level to generate the test model. The outputs of the results are compared to expected output.
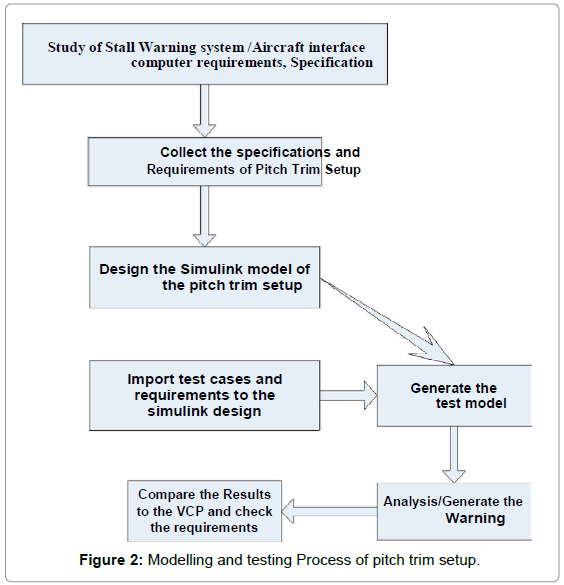
Figure 2: Modelling and testing Process of pitch trim setup.
Pitch trim set-up specification and the functionality requirements are implemented based on the SWS/AIC system requirements. Specification of servomotor, applied voltage, length of connecting wires, length of linkages, pitch trim tab dimensions, specification of potentiometer with applied voltage, types of joints with dimension, servomotor, maximum speed, and maximum torque values are used to model the pitch trim setup. The specifications are implemented into the model using Matlab 2013a [10-12].
Validating the approach
The model correctness is validated at two levels: Pitch trim set-up validation, functionality and performance validation.
Trim set-up model validation: The first level validation is carried out for trim set-up which is an electro-mechanical model. Once setup is modelled, voltage supply is given and the movement of the trim surface is checked from one extreme to other. The time for complete movement, voltage corresponding to each degree is captured and verified against the actual time and movement captured on the aircraft [12-14].
Functionality and performance analysis of the model: The pitch trim command and monitor algorithm is embedded into the trim model. Pitch trim functionality and performance of trim algorithm is analyzed with respect to the requirements and validated against the Hardware-Software Integration Verification Cases & Procedures (HSIVCP) [15]. HSI VCP test scenarios are provided to the model and the output of the model were compared to the test cases for the correct and complete implementation of the model. The results are analyzed for validating the end-end correctness of trim functionality
Figure 3 shows block diagram for implementation and analysis approach. The analyses of the models help in validating the correct implementation of the model with respect to the referenced document and data. The output of the analysis is saved in the Matlab workspace for each and every test scenario. Further the output data is plotted for further analyses [16-20]. The pitch-trim setup of SARAS is based on the project specification and requirements. The trim-tab setup is modeled in Matlab 2013a. The set-up model is validated for its correct implementation by proven aircraft trim functionality data. The algorithm is checked against the trim functionality requirements.
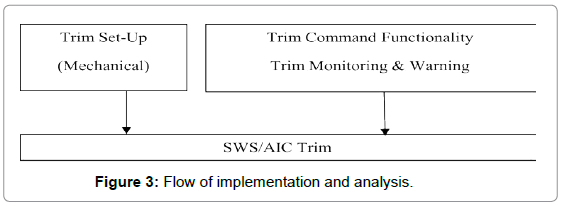
Figure 3: Flow of implementation and analysis.
The simulink model of Pitch trim setup has three main subsystems:
a. Pitch Trim Setup emulating the aircraft pitch-trim,
b. Pitch Trim command logic, and
c. Pitch Trim Warning Logic (1)
Top level model
The Pitch Trim top level model consists of the pilot/co-pilot inputs, pitch trim command logic, and pitch trim mechanical setup, and monitoring/warning logics. Figure 4 shows the Top Model. The inputs are given in the form of manual switch discrete manner (1-ON and 0-Off). Outputs of the simulation are shown in display and scope. Outputs also in the form of discrete (1-warning and 0-no warning) [3-7].
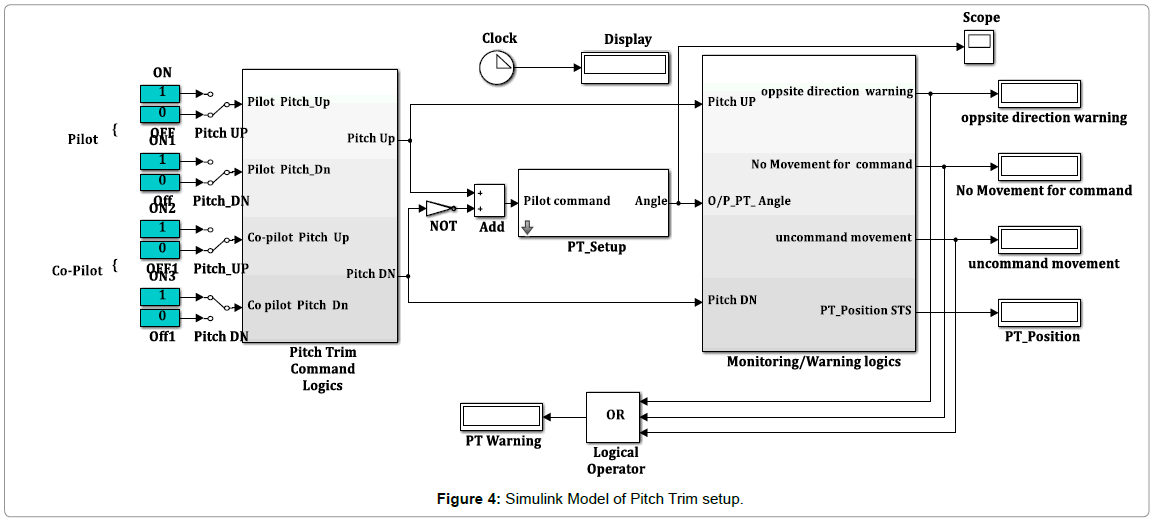
Figure 4: Simulink Model of Pitch Trim setup.
Pitch trim command logic model
The pitch trim input command is given by pilot either co-pilot. The command is given in the discrete form. Figure 5 has four input port (pilot pitch up and pitch down, co-pilot pitch up and pitch down). With four inputs 16 combination of inputs are possible. Out of 16 inputs some combinations result in pitch up command and some combinations results in pitch down command are true. K-Map technique is used to reduce the complexity. In this technique we avoid some invalid combination of inputs. The pitch trim command logic is modeled based on the pilot and co-pilot pitch up/pitch down command
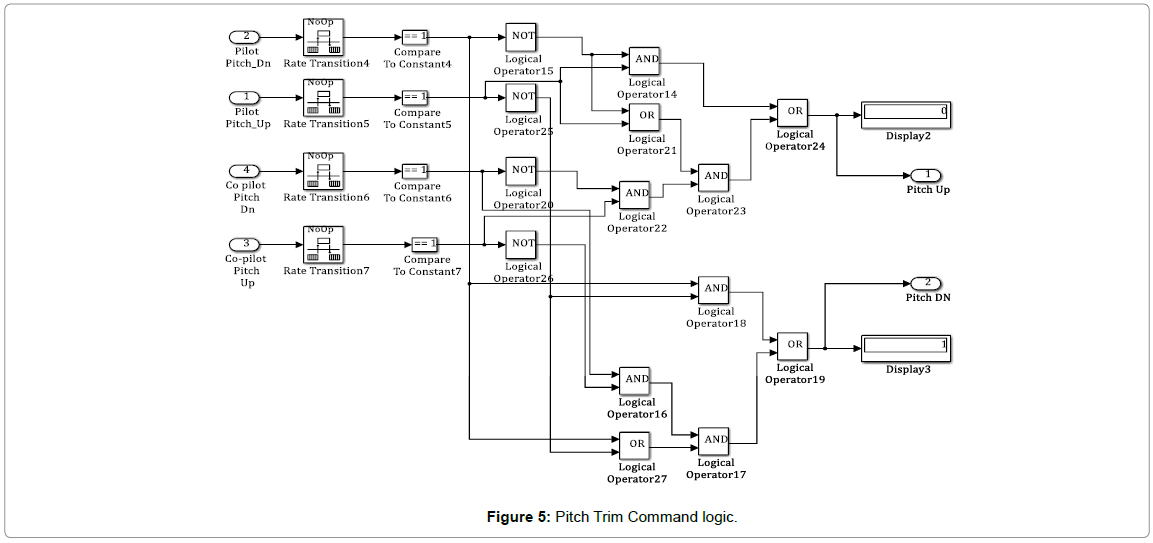
Figure 5: Pitch Trim Command logic.
Pitch trim mechanical model
The mechanical Pitch Trim Setup is modeled by three subsystem servomotor mechanism, crank-lever mechanism, and linkages mechanism. Servomotor will activate when pilot/co-pilot gives a command. Servomotor output torque is the input of the next crank lever mechanism subsystem. Connecting rods are moving because of applied torque from servomotor. At the end of the connecting rods the trim surface is connected. When connecting rods are activate then the trim surface will move up and down based on the pilot command. A joint between trim tab and connecting rod, the potentiometer is connected and this potentiometer excitation voltage is 11.3V. The excitation voltage (of 28 V) is measured for all the trim tab position for various time steps [7,8].
Servomotor mechanism: Figure 6 consists of servomotor block, controlled PWM voltage block, electrical reference, ideal torque sensor block and DC voltage source. Once command is activated the servomotor starts to rotate and produces torque. This torque is measured by using ideal torque sensor block and it passes through the crank lever mechanism. For the pilot pitch trim up/down command for, the crank lever mechanism is connected as input port in1.
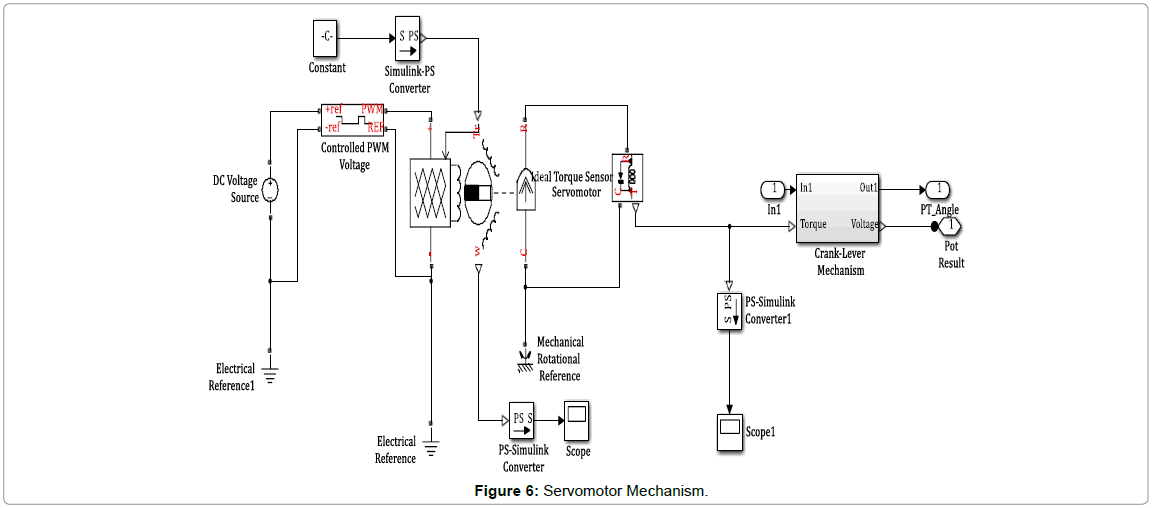
Figure 6: Servomotor Mechanism.
Crank-lever mechanism: The output of the linkages mechanism is connected to the potentiometer. Potentiometer measures the voltage based on the trim surface movement. It’s shown in Figure 7.
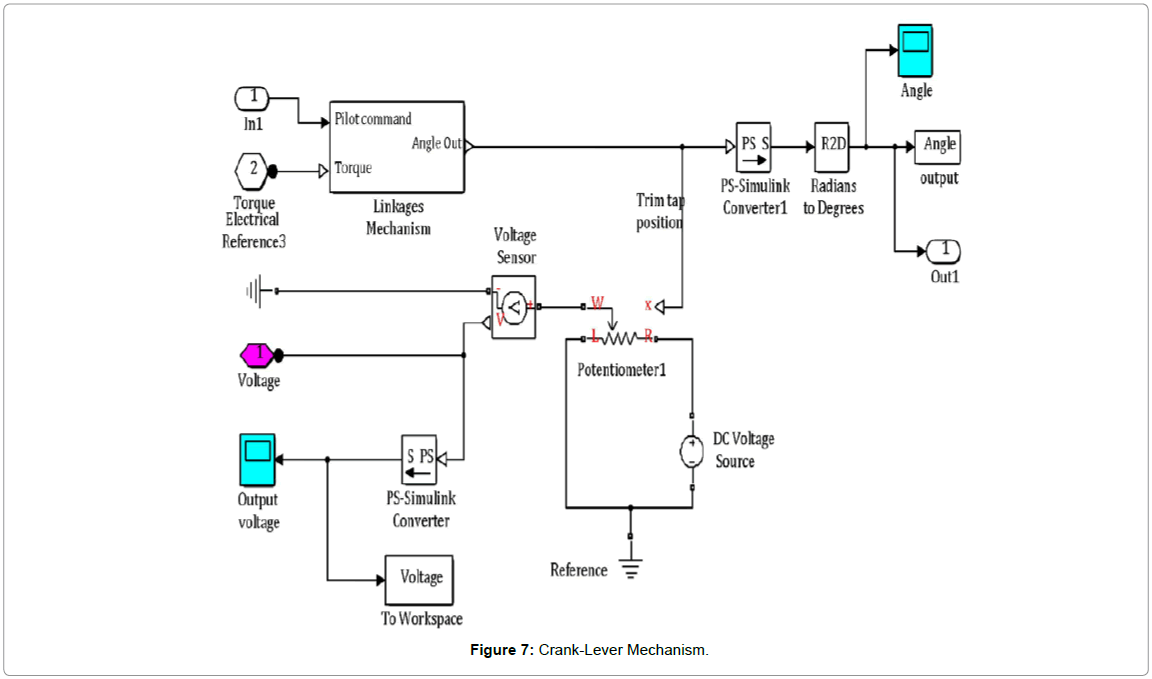
Figure 7: Crank-Lever Mechanism.
Linkages mechanism: Dimensions of connecting rods, connecting wheels, types of joints and trim-tab dimension are measured in the actual experimental setup. Figure 8 shows the linkage mechanism, where the solid blocks represent the connecting rods.
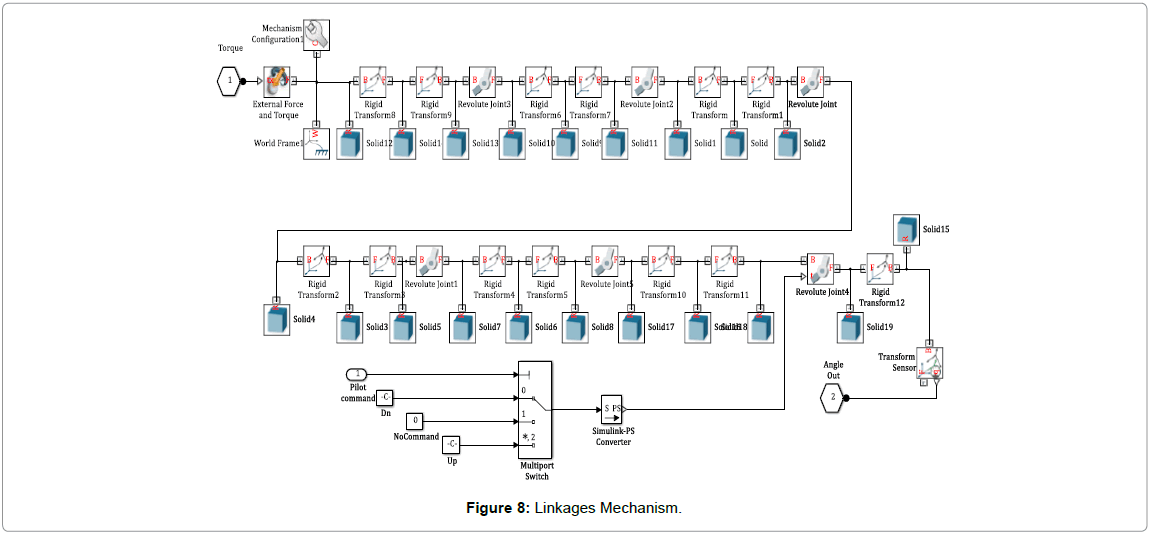
Figure 8: Linkages Mechanism.
This subsystem models all the mechanical part of the pitch trim setup. The model has been designed as per the actual setup. The requirements and specification of servomotor, potentiometer, voltage supply, surface dimension and types of joints are got from Aircraft design and requirements documents
Pitch trim warning/monitoring algorithm: The pitch trim surface position is provided as an analog input to the system by means of feedback signal. When pilot gives the pitch up command, the surface will move in clockwise direction and for pitch down command the surface will move in anti-clockwise direction. Based on the pilot command, motor provides the PWM command and the surface moves. The monitoring functionality monitors the surface movement as per the command and in case there is a problem then the warning is announced after the persistence time. Figure 9 shows the monitoring and warning logics of the pitch trim setup. Output of this subsystem is the final to save in the matlab workspace. Those outputs are used for further analysis and validation purposes [21-24].
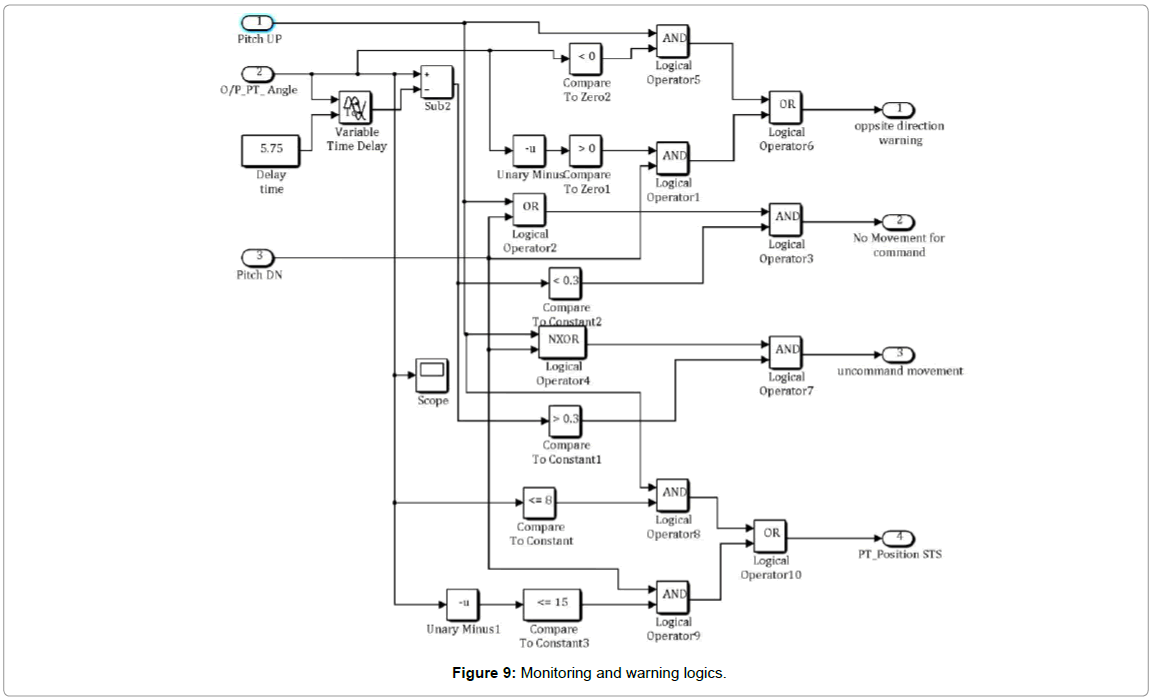
Figure 9: Monitoring and warning logics.
The excitation voltage from potentiometer and the corresponding trim tab positions are saved in the Matlab workspace. The total trimtab movement is from 0 to 23 degrees and the corresponding measured voltage value is 0.06805 V to 7.85244 V. Trim-tab moves linearly with respect to time and the measured voltage value varies linearly from 0.06805 V to 7.85244 V. These results are compared with the original laboratory setup. In the Experimental setup, the Trim tab also moves 23 degrees i.e. from 8 degree to -15 degree. The measured voltage varies from 0.4751 V to 7.827 V corresponding to -15 and 8 degree.
The percentage of error obtained with the model based approach for the trim surface and algorithm validation is about 5.5% corresponding to 0.43248 V (Table 1).
| Degrees | Voltage(Model) | Voltage(Lab Set up) | Difference |
|---|---|---|---|
| 0DEG(-15deg) | 0.06805V | 0.4751V | 0.40345 |
| 23DEG(-8deg) | 7.85244V | 7.827V | 0.0252 |
| Total Voltage Swing | |||
| MODEL | 7.85244-0.06805= | 7.78438V | |
| LAB SET UP | 7.827-0.4751= | 7.3519V | |
| Voltage Swing Difference: 7.78438 V-7.3519 V=0.43248(5.5%) | |||
Table 1: Result Analysis.
The surface movement for persistence time 500 msec, 400 msec, 300 msec and 200 msec is analyzed and the results are shown in below (Figure 10-13). The analysis is required to fix the persistence for providing the warning. Figure 10 shows the pitch trim warning after a persistence time of 500 msec. Trim warning is provided for trim runaway as seen in the Figure 10, with 28 V supply corresponding to 100% PWM, the surface is moves from 0 degree to 0.348369 degree with a pitch down command in 500 msec duration Trim surface movement is greater than 0.3 degree in 500 msec, and as per the current algorithm pitch trim warning will announced to the test crew. Figure 14 is representing the pitch trim surface movement at various persistence times. Meaning of the red line is corresponding to the persistence time 500 msec and this point, surface exceed limit and generate the pitch trim warning.
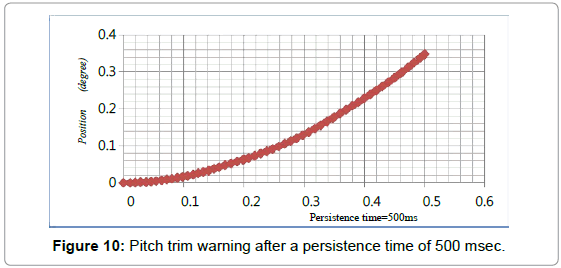
Figure 10: Pitch trim warning after a persistence time of 500 msec.
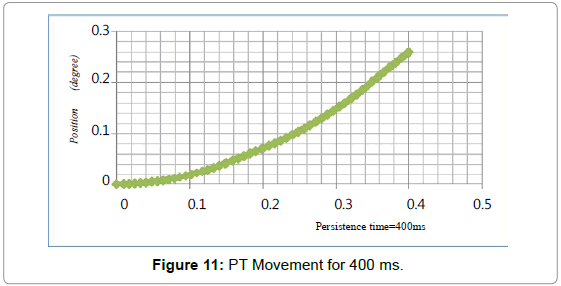
Figure 11: PT Movement for 400 ms.
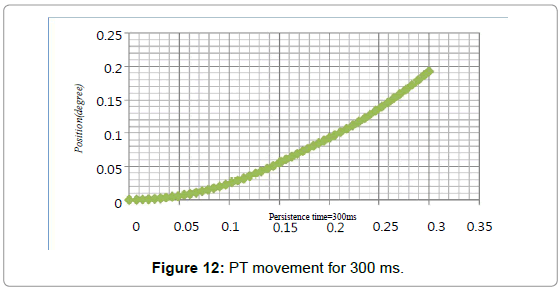
Figure 12: PT movement for 300 ms.
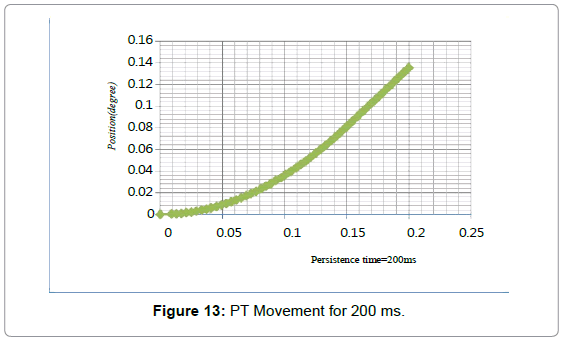
Figure 13: PT Movement for 200 ms.
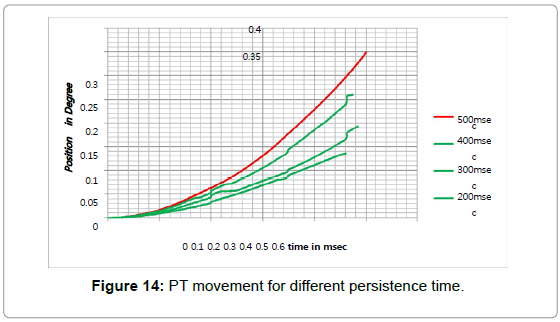
Figure 14: PT movement for different persistence time.
PWM output analysis
Table 2 is representing the different pitch trim rate for different applied PWM voltage. All the results of PWM output are shown in Table 2. From the PWM analysis the rate of pitch trim movement is good for 62.5%. It was accepted by the wing commander from NAL. The rate of movement at 62.5% PWM is 0.25 d/s. Figure 15 is shown the variation of pitch trim movement from 100% PWM to 50%. PWM of 62.5% is giving the Pitch trim smooth movement not to speed and not a too slow. So, the optimized value of rate is considered in this PWM and the rate is 0.25 degree/sec.
| % PWN | Total Swing (degree) | Time taken for total swing(sec) | Rate of Movement (d/s) | Rate for movement for 100 m sec |
|---|---|---|---|---|
| 100 | ~ =23 | 5 | 4.6 | 0.46 |
| 95 | ~ =23 | 5.12 | 4.49 | 0.449 |
| 90 | ~ =23 | 5.26 | 4.37 | 0.437 |
| 85 | ~ =23 | 5.41 | 4.25 | 0.425 |
| 80 | ~ =23 | 5.57 | 4.13 | 0.413 |
| 75 | ~ =23 | 5.75 | 4 | 0.4 |
| 70 | ~ =23 | 5.95 | 3.87 | 0.387 |
| 65 | ~ =23 | 6.17 | 3.73 | 0.373 |
| 60 | ~ =23 | 6.42 | 3.58 | 0.358 |
| 55 | ~ =23 | 6.7 | 3.43 | 0.343 |
| 50 | ~ =23 | 7.02 | 3.28 | 0.328 |
Table 2: PWM output with rate of movement.
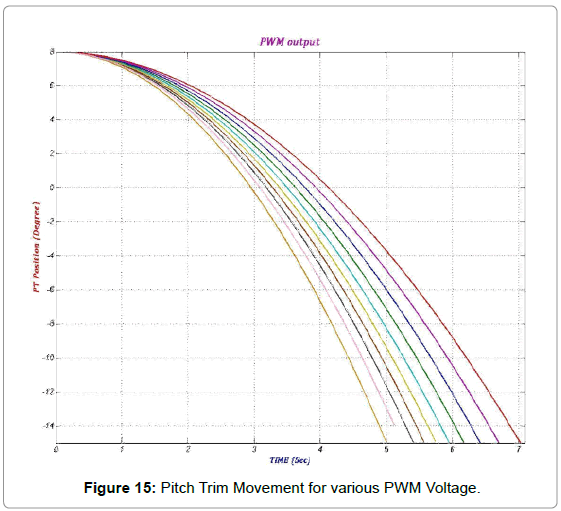
Figure 15: Pitch Trim Movement for various PWM Voltage.
Model-Based approach can be used to analyze critical sub-system functionality and performance. The case study of pitch-trim set-up and the detailed analysis proves the effectiveness of this approach. The correctness of the model set-up with the modified algorithm is validated against the data from the aircraft pitch trim functionality test. The results of the analysis is tabulated, plotted and compared with experimental results. The percentage of error obtained is 5.5% proving the model correctness 94.5% which is similar to the original experimental setup in the laboratory. The persistence time of 500 msec is the optimum time for generating the trim warning as the other persistence time does not provide the surface movement for warning generation.
The model-based approach to analyze the performance can be incorporated in the engineering process help the engineers in detecting the design flaws and inconsistency earlier in the process.